
Trí tuệ nhân tạo (AI) và bộ điều khiển biên có thể xuất lệnh tối ưu hóa quỹ đạo chuyển động chỉ trong vài mili-giây. Tuy nhiên, nếu hệ truyền động vật lý phản hồi chậm, hoặc các khớp cơ khí tồn tại độ rơ vặn xoắn, “ứng viên” robot đó vẫn sẽ làm xước mảng mạch điện tử hoặc làm rơi vỡ linh kiện.
Dưới góc nhìn của một “Nhân sự Robot”, việc tuyển dụng và đánh giá năng lực của một cỗ máy không thể chỉ dựa vào những con số marketing hào nhoáng trên catalogue. Chúng ta phải đi sâu mổ xẻ phần cứng lõi: động cơ, hệ thống truyền động và bộ điều khiển – những yếu tố quyết định trực tiếp đến năng lực thực chiến và tỷ suất hoàn vốn (ROI).
Ranh Giới Giữa “Máy Móc Đơn Nhiệm” Và “Nhân Sự Đa Nhiệm”
Trong môi trường công nghiệp, ranh giới giữa một cỗ máy tự động hóa thông thường và một robot thực thụ nằm ở khả năng tái lập trình (reprogrammable) để thực thi các chuỗi chuyển động phức tạp. Chìa khóa để đạt được sự linh hoạt này chính là hệ thống điều khiển chuyển động đa trục tinh vi, cho phép robot thích ứng ngay lập tức khi vòng đời sản phẩm thay đổi.

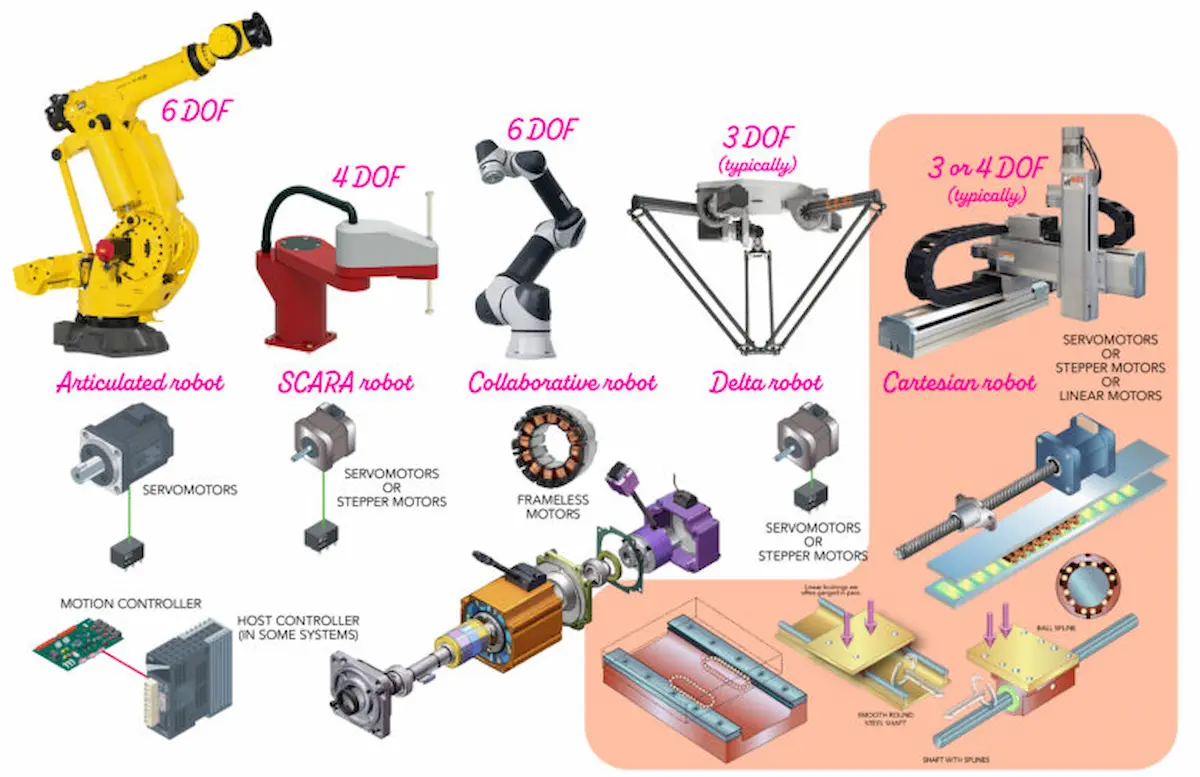
Đọc Vị “Bản Mô Tả Công Việc” Qua Từng Hệ Sinh Thái
1. Robot Cartesian (Tịnh tiến): Lực lượng mở rộng quy mô vô hạn
Hệ thống Cartesian cấu thành từ các cụm trượt tuyến tính (actuators), vít me bi và động cơ. Điểm mạnh cốt lõi của “ứng viên” này là khả năng chịu tải trọng nặng và biên độ mở rộng không giới hạn (scalability). Việc xây dựng trạm làm việc dựa trên các cụm trượt tuyến tính module hóa từ các nhà cung cấp như PHD Inc. mang lại sự linh hoạt tuyệt đối cho các bài toán định tuyến diện rộng mà các tay máy bị giới hạn bởi sải tay không thể đáp ứng.
2. Robot SCARA: “Nhân viên” lắp ráp vi mô và bài toán ROI bền vững
Sự ưu việt của một SCARA công nghiệp chuẩn mực (như các dòng của Epson hay Yamaha) nằm ở hai điểm mấu chốt:
- Trục vít me – then hoa (Ball Screw Spline): Kiệt tác này cho phép thực hiện đồng thời chuyển động tịnh tiến (trục Z) và xoay hướng (trục Theta) trên cùng một trục vật lý đồng trục. Thiết kế này giúp đầu tác động (end-effector) cực kỳ gọn nhẹ, giảm tối đa quán tính khi cánh tay quét mặt phẳng ở tốc độ cao.
- Encoder tuyệt đối không dùng pin (Battery-less Absolute Encoder): Đây là yếu tố sống còn cho ROI. Việc loại bỏ pin nuôi nguồn giúp doanh nghiệp giải quyết “nỗi đau” bảo trì thay pin định kỳ cho hàng trăm robot mỗi năm, đồng thời đảm bảo hệ thống duy trì tọa độ tức thì ngay khi có điện trở lại.
3. Delta (Spider Robots): Chuyên gia tốc độ và sự thật về hộp số
Delta robot là lựa chọn duy nhất cho các trạm phân loại hàng hóa yêu cầu gia tốc cực đại (có thể chạm ngưỡng 10G – 15G).
- Lựa chọn Hộp số hành tinh (Planetary Gearhead): Tại sao không dùng hộp số sóng (Harmonic Drive) dù chúng “zero-backlash”? Thực tế, hộp số sóng dễ bị vỡ gờ răng (shearing) khi chạy giật cục ở gia tốc lớn. Hộp số hành tinh tuy tồn tại độ rơ nhỏ (1-5 arcmin) nhưng lại sở hữu độ cứng xoắn (torsional stiffness) cực cao và khả năng chịu tải va đập xuất sắc.
Bảng So Sánh Năng Lực Vận Động & Hiệu Suất Đầu Tư (ROI)
| ĐẶC TÍNH KỸ THUẬT | Robot Cartesian | Robot SCARA | Delta (Spider) | Robot 6 Trục (Articulated) |
| GIA TỐC TỐI ĐA | 1 - 2G | 2 - 5G | 10 - 20G (Cực đại) | 2 - 3G |
| ĐỘ LẶP LẠI | ±0.01 mm (Ổn định) | ±0.01 - 0.02 mm | ±0.05 - 0.1 mm | ±0.02 - 0.05 mm (Biến thiên) |
| TRUYỀN ĐỘNG LÕI | Vít me bi / Đai răng | Ball Screw Spline | Hộp số hành tinh | Hộp số sóng (Harmonic) |
| ĐỘ CỨNG XOẮN | Rất cao | Cao (Ưu thế trục Z) | Cực cao | Trung bình (Độ võng cao) |
| BẢO TRÌ DỰ KIẾN | Thấp | Thấp - Trung bình | Trung bình (Khớp cầu) | Cao (Nhiều cụm hộp số) |
“Tử Huyệt” Vận Động Của Robot 6 Trục (Articulated 6-DoF)
Robot 6 trục mang lại biên độ chuyển động linh hoạt nhất, nhưng cũng chịu tác động nặng nề nhất bởi các quy luật vật lý:
- Sai số Abbe (Abbe Error): Các lỗi góc nhỏ bé tại khớp xoay cơ sở sẽ bị khuếch đại tuyến tính theo chiều dài cánh tay đòn. Tầm với càng xa, sai số không gian ở đầu tay gắp càng lớn.
- Hiện tượng rung động dư (Residual Vibration): Khi tay máy duỗi thẳng, độ cứng vững hướng tâm giảm xuống mức thấp nhất. Quán tính khiến đầu tác động dễ bị rung động ngay cả khi lệnh dừng đã được thực thi, làm chậm nhịp độ sản xuất.
- Điểm kỳ dị (Singularity): Khi các trục căn chỉnh thẳng hàng, bộ giải mã toán học bị chia cho 0. Tại đây, ma trận Jacobian của hệ thống trở nên suy biến, khiến vận tốc khớp tiến dần đến vô cực, gây ra hiện tượng robot chuyển động giật cục vô hướng.

Sai Số Bạc Cắc Phá Vỡ Hệ Thống Tiền Tỷ
Hiện tượng trôi tâm dụng cụ hay kẹt cơ khí thường xuất phát từ sai số cộng dồn (stack-up error) của các chi tiết nhỏ. Việc sử dụng vòng đệm (washers) hay miếng chêm (shims) chất lượng cao từ các hãng như Boker’s để tinh chỉnh tải trọng gối đỡ và khe hở cơ khí là thao tác bắt buộc. Tiết kiệm vài đô-la vật tư có thể dẫn đến việc phá hủy toàn bộ cụm chuyển động tiền tỷ của doanh nghiệp.
Tầm Nhìn 2030: Sự Tích Hợp Của Xúc Giác Động Cơ
Tiến tới năm 2030, năng lực vận động của robot sẽ chuyển dịch từ “cơ bắp thuần túy” sang “cảm giác thông minh”. Các dòng Bộ điều khiển Servo (Servo Drive) cao cấp sẽ biến dòng điện tiêu thụ thành dữ liệu phản hồi lực (force feedback) theo thời gian thực. Robot sẽ “cảm nhận” được độ cứng của vật thể qua chính hệ thống truyền động mà không cần cảm biến lực ngoại vi đắt đỏ. Hiểu đúng bản chất vật lý của truyền động cơ khí là bước đi tiên quyết để làm chủ tương lai của chuỗi cung ứng tự vận hành.

{kind=link}