
Trong bối cảnh khủng hoảng nhân sự logistics, các tập đoàn như Amazon và GXO đang tích cực tìm kiếm giải pháp lấp chỗ trống. Agility Robotics đã đưa Digit vào tham chiến với tư cách là một “nhân sự tự động” cắm-và-chạy (plug-and-play). Tuy nhiên, gạt bỏ những video quảng cáo mượt mà trên mạng, hồ sơ năng lực thực chiến của “ứng viên” này trên sàn nhà kho nói lên điều gì?
Dưới lăng kính của một đại lý tuyển dụng robot, chúng ta sẽ bóc tách trực diện Bản mô tả công việc (JD) của Digit bằng các chỉ số đo lường hiệu năng kỹ thuật lạnh lùng nhất.
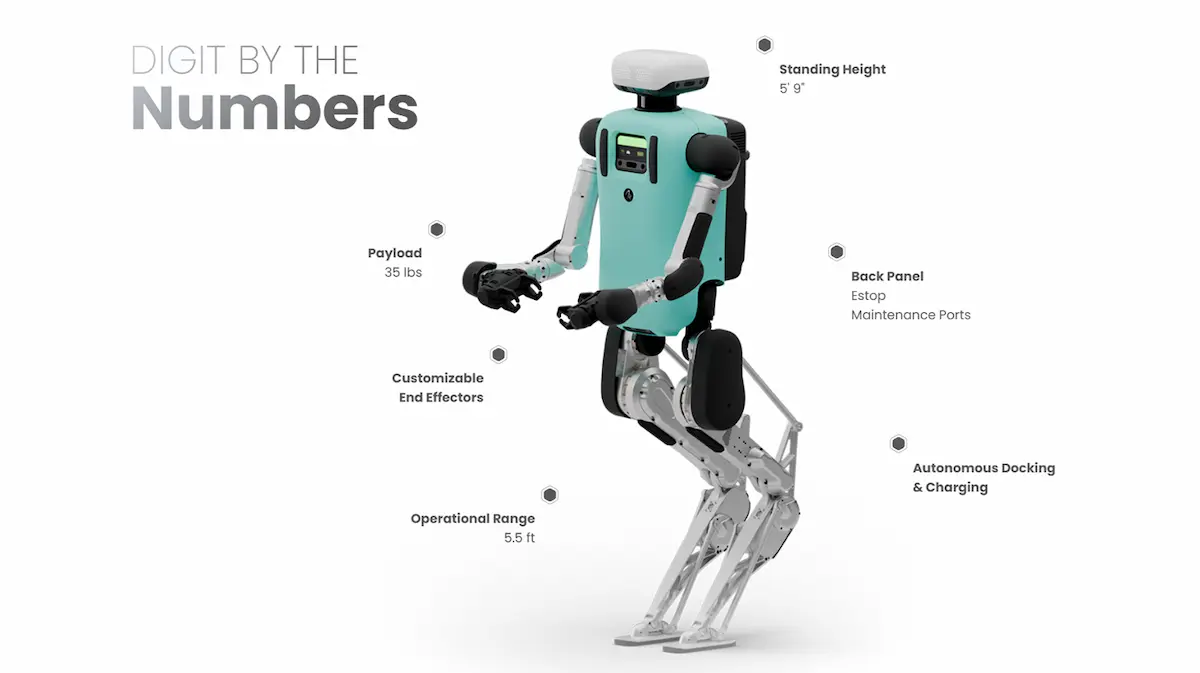
1. Tải trọng 16kg và đôi chân “ngược đời”
Nhiệm vụ cốt lõi của Digit không phải là chơi đàn piano hay nấu ăn, mà là làm “cửu vạn” luân chuyển thùng hàng tiêu chuẩn (Totes). Để làm được điều này, phần cứng của Digit được thiết kế vô cùng thực dụng.
“Ứng viên” này sở hữu sức tải tối đa (Payload) là 16 kg. Con số này không phải là sự ngẫu nhiên, mà nó bao trùm chính xác 80% trọng lượng các thùng hàng tiêu dùng hỗn hợp tại Amazon. Khi mang mức tải 16kg ở trước ngực, Digit duy trì tốc độ di chuyển 1,5 m/s (khoảng 5,4 km/h) – khớp hoàn toàn với tốc độ đi bộ nhịp độ nhanh của một nam công nhân kho bãi khỏe mạnh.
Sự ổn định động học này đến từ thiết kế đôi chân gập ngược theo cấu trúc chân chim đà điểu (kinematics). Thay vì cố gắng sao chép tư thế đứng thẳng của con người một cách miễn cưỡng, khớp gập ngược tự động hạ thấp trọng tâm khối lượng. Điều này tạo ra một lợi thế cơ sinh học khổng lồ, giúp Digit tiết kiệm triệt để công suất tiêu thụ điện khi phải liên tục ngồi xổm nhấc hàng từ mặt sàn so với các thiết kế chân thẳng truyền thống.
2. Chu kỳ thao tác 2 giây: Sự đánh đổi giữa linh hoạt và hiệu quả
Một Giám đốc Vận hành (COO) không mua một con robot hình người, họ mua thông lượng (throughput). Tốc độ giải quyết một khối lượng công việc được tính bằng Thời gian chu kỳ (Cycle Time).
Trong khi các đối thủ như Tesla Optimus nhồi nhét tới 22 bậc tự do vào một bàn tay mô phỏng sinh học để trình diễn, Digit lại sử dụng cụm tay gắp kẹp đơn giản (End-of-Arm Tooling – EOAT) chỉ với 4 bậc tự do. Đây là một sự hy sinh ngoại hình để đổi lấy độ bền công nghiệp nặng. Cơ cấu ngàm kẹp triệt tiêu hoàn toàn rủi ro đứt cáp truyền động hay quá nhiệt ở các khớp ngón tay nhỏ.
Dữ liệu ghi nhận từ dây chuyền của Toyota (với hơn 90.000 linh kiện được xử lý) cho thấy thời gian chu kỳ thuần túy để tay máy của Digit kẹp, nhấc bổng khối hàng và đặt xuống chỉ mất đúng 2 giây. Sự kết hợp giữa thời gian bốc dỡ 2 giây và tốc độ di chuyển 1,5 m/s đảm bảo Digit không tạo ra bất kỳ một nút thắt cổ chai nào khi chia sẻ không gian làm việc với các hệ thống xe tự hành (AMR).

3. Tỷ lệ rơi vỡ 2%: Sự thật về độ tin cậy vận hành
Tốc độ di chuyển nhanh sẽ trở thành thảm họa nếu robot liên tục đánh rơi hàng hóa, gây kẹt hệ thống băng tải. Theo dữ liệu sau 18 tháng kiểm thử khắc nghiệt tại các trung tâm hoàn thiện đơn hàng của Amazon, Digit đạt tỷ lệ hoàn thành tác vụ thành công ở mức 98%.
Từ lăng kính toán học nghịch đảo, điều này có nghĩa là “ứng viên” này có Tỷ lệ lỗi (Drop rate) xấp xỉ 2% trong toàn bộ ca làm việc 8 tiếng. Hãy làm một phép tính thực dụng: Nếu Digit trung chuyển 1.000 thùng Totes trong một ca, sẽ có khoảng 20 thùng bị gắp hụt hoặc đánh rơi.
Mức sai số 2% này trong một môi trường hỗn loạn, thiếu ánh sáng chuẩn là một thành tựu đáng nể của công nghệ đo lường chiều sâu quang học (camera Intel RealSense và LiDAR). Tuy nhiên, nó cũng khẳng định một sự thật kỹ thuật: Digit là một “đồng nghiệp” (co-worker), không phải kẻ thay thế con người 100%. Nhà kho vẫn cần một biên chế con người đóng vai trò giám sát, xử lý các sự cố ngoại lệ và dọn dẹp 2% số hàng bị rớt này.
4. Điểm mù kỹ thuật: Tại sao Digit mất hàng chục giây để đứng dậy?
Khả năng phục hồi sau va chạm (Fall-recovery) là điểm mù lớn nhất bị các chiến dịch truyền thông cố tình lờ đi. Khi Digit trượt ngã trên sàn nhà kho, không có bất kỳ thông số tĩnh nào (kiểu 1 giây hay 3 giây) cam kết thời gian robot tự đứng lên.
Điều này bắt nguồn từ một giới hạn vật lý cứng: Tắc nghẽn nhiệt (Thermal Throttling). Khi ngã sấp, thao tác chống tay tự đẩy một khối lượng tĩnh 65kg lên ở góc độ bất lợi nhất đòi hỏi một sự bùng nổ mô-men xoắn (torque demand) cực đại ở các khớp nối. Nếu máy tính trung tâm ép hệ thống mô-tơ điện phải đứng bật dậy ngay lập tức như phim hành động, cuộn dây bên trong sẽ sinh nhiệt cục bộ và bốc cháy.
Do đó, sau khi dùng cánh tay để hấp thụ gia tốc lúc ngã, lõi AI của Digit buộc phải tính toán lộ trình vận động an toàn nhất cho nhiệt độ mô-tơ. Quá trình này có thể mất hàng chục giây lóng ngóng. Đôi khi, “nhân sự tự động” này sẽ phải chờ nhiệt độ hạ xuống trước khi có thể tiếp tục công việc.
Chuỗi bài về robot Digit
- Đang đọc bài 1: Đánh giá Robot Kho bãi: Sự thật về năng suất bốc xếp thực tế của Digit
- Bài 2: Bài toán Chi phí: Tỷ suất hoàn vốn khi thuê nhân sự tự động Digit
- Bài 3: Cấu trúc Phần cứng: Sự thật đằng sau thiết kế chân ngược của Robot Digit
- Bài 4: Tích hợp Hệ thống: Rào cản kết nối phần mềm kho bãi với Robot Digit

{kind=link}