
Trong bài toán nhân sự tự động, cơ khí chỉ là phần xác, phần mềm mới là phần hồn. Một “ứng viên” robot bốc vác xuất sắc đến đâu cũng sẽ trở thành thảm họa nếu không thể giao tiếp với hệ thống quản lý hiện tại, hoặc phản ứng quá chậm chạp trước một chiếc xe tự hành đang lao tới.
Agility Robotics định vị Digit là giải pháp “cắm-và-chạy”. Nhưng sự thật kỹ thuật trên sàn nhà kho phức tạp hơn những lời hứa hẹn API (Giao diện lập trình ứng dụng) rất nhiều. Hãy cùng rã máy lõi AI và bóc tách các điểm mù sinh tử của “ứng viên” này.
1. Rào cản “những hòn đảo tự động hóa” và Giao thức kết nối
Hầu hết các nhà kho hiện nay là những “hòn đảo tự động hóa” phân mảnh. Doanh nghiệp không thể đập bỏ hệ thống phần mềm cũ để chiều lòng một con robot mới.
Thay vì ép doanh nghiệp viết lại mã, Digit sử dụng một lớp phần mềm trung gian trên đám mây gọi là Agility Arc. Hệ thống này sử dụng các chuẩn kết nối phổ quát để nhận lệnh từ WMS/ERP (Hệ thống quản lý kho/Hoạch định nguồn lực doanh nghiệp). Đồng thời, để gọi các xe tự hành (AMR) đến nhận hàng, hệ thống tuân thủ tiêu chuẩn giao tiếp VDA 5050.
Tuy nhiên, đối với các lệnh an toàn khẩn cấp, mạng internet là không đủ tin cậy. Digit áp dụng giao thức mạng công nghiệp FSoE (Functional Safety over EtherCAT) kết hợp bộ điều khiển an toàn. Khi có lệnh dừng khẩn cấp (CAT1 Stop), robot không ngắt điện đột ngột khiến cả khối sắt 64kg đổ sập, mà duy trì điện năng để tự động hãm phanh và hạ trọng tâm an toàn.

2. Sự trôi dạt định vị trong không gian đồng nhất
Kho bãi logistics là cơn ác mộng của các thuật toán nhận thức quang học. Hàng trăm mét hành lang với các dãy kệ và hàng nghìn thùng nhựa giống hệt nhau khiến hệ thống Visual SLAM (Định vị và lập bản đồ đồng thời bằng thị giác) bị mất phương hướng, dẫn đến sai số tọa độ (sự trôi dạt – drift).
Để khắc phục “điểm mù mặt phẳng” này, Digit không dùng công nghệ quét 2D rẻ tiền. “Ứng viên” này đội trên đầu một cảm biến LiDAR 360 độ kết hợp với 4 camera đo chiều sâu Intel RealSense. Khối dữ liệu khổng lồ này được nén xuống và xử lý ngay tại bộ vi xử lý trên thân máy (Edge AI – Trí tuệ nhân tạo tại biên), loại bỏ hoàn toàn độ trễ nếu phải gửi dữ liệu lên đám mây.
3. Bài toán sinh tử 50 mili-giây tại giao lộ
Hãy đặt một bài toán thực chiến: Digit đang ôm thùng hàng 16kg và một chiếc xe tự hành AMR lao cắt ngang với vận tốc 2 m/s. Hệ thống có bao nhiêu thời gian để tránh một vụ va chạm?
Đo lường sự thật kỹ thuật chỉ ra rằng, tổng độ trễ xử lý (Latency) từ lúc ánh sáng lọt vào camera đến khi động cơ gối bắt đầu hãm phanh rơi vào khoảng 31 đến 48 mili-giây. Cụ thể:
- Khung hình camera: Trễ 16 – 33 ms để chớp sáng.
- Suy luận lõi AI: Trễ dưới 10 ms để nhận diện chiếc xe AMR.
- Vòng lặp điều khiển (Control Loop): Trễ 4 ms để phát lệnh xuống khớp truyền động.
Trong 50 mili-giây đó, chiếc AMR đã lao tới thêm 10cm. Đây là một ranh giới cực kỳ mong manh đối với động lực học vật lý, đòi hỏi hệ thống cân bằng quán tính (IMU) phải liên tục vi chỉnh hàng nghìn lần mỗi giây để Digit không bị lật nhào về phía trước do lực quán tính của thùng hàng.
4. Bóng đen tử thần: Điểm mù vật lý ngay dưới gầm ngực
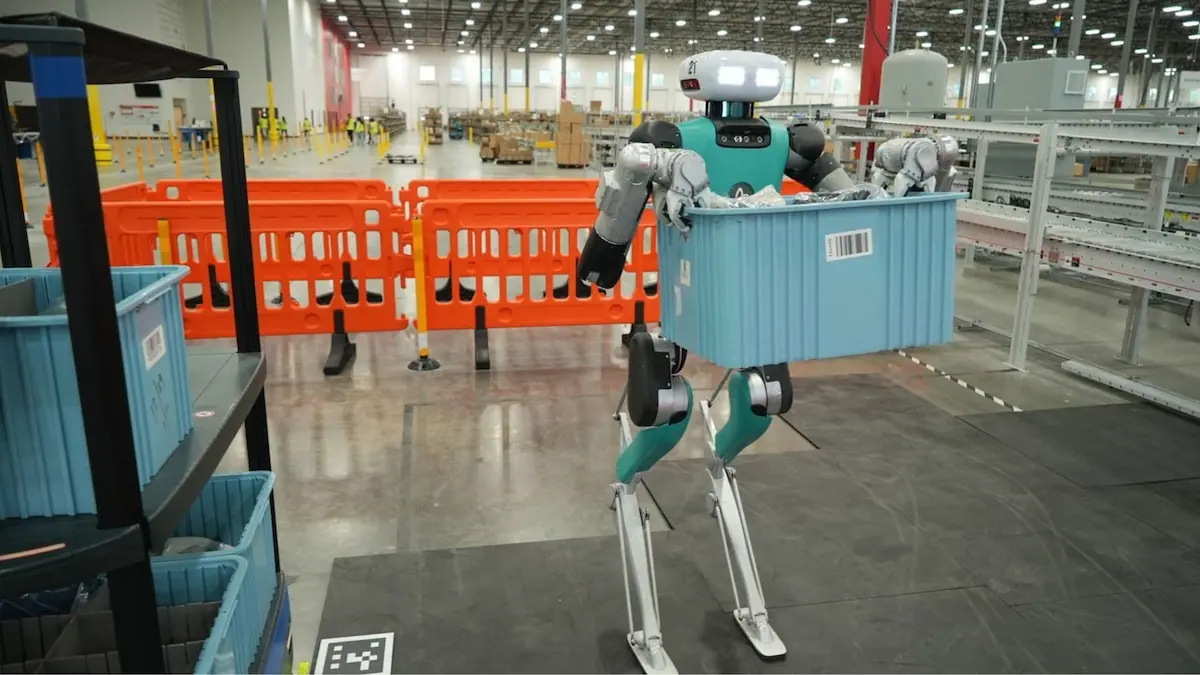
Dù được trang bị hệ thống mắt thần tối tân trên đỉnh đầu, Digit mang một khiếm khuyết hình học không thể sửa chữa: Điểm mù do chính tải trọng nó đang mang.
Khi “ứng viên” này ôm một thùng hàng 16kg ngang ngực, khối vật chất này tạo ra một vùng bóng đen che khuất hoàn toàn mặt sàn từ khoảng cách 0.5 đến 1 mét ngay trước mũi chân. Nếu một cuộn băng keo lăn vào, hay có vết dầu loang xuất hiện đột ngột ngay trong vùng mù này, camera trên đầu hoàn toàn bất lực.
Để sinh tồn, lõi AI của Digit sử dụng cơ chế Lưới chiếm dụng tích lũy (Accumulative Occupancy Grid) – một dạng “trí nhớ ngắn hạn”. Robot sẽ quét và ghi nhớ địa hình phía trước từ xa, và bước đi dựa trên niềm tin rằng mặt sàn chưa bị thay đổi trong vài giây vừa qua. Nếu có biến số động lọt vào điểm mù này, Digit chỉ còn biết dựa vào thuật toán phản xạ chống ngã sau khi đã dẫm phải chướng ngại vật.
Chuỗi bài về robot Digit
- Đang đọc bài 1: Đánh giá Robot Kho bãi: Sự thật về năng suất bốc xếp thực tế của Digit
- Bài 2: Bài toán Chi phí: Tỷ suất hoàn vốn khi thuê nhân sự tự động Digit
- Bài 3: Cấu trúc Phần cứng: Sự thật đằng sau thiết kế chân ngược của Robot Digit
- Bài 4: Tích hợp Hệ thống: Rào cản kết nối phần mềm kho bãi với Robot Digit

{kind=link}