
Thị trường robot hình người (Humanoid) hiện nay đang rơi vào cái bẫy của những video trình diễn được cắt ghép kỹ lưỡng và kịch bản lập trình sẵn. Tuy nhiên, sự xuất hiện của Figure 01, kết hợp cùng mô hình ngôn ngữ lớn (LLM) từ OpenAI, đã định nghĩa lại hoàn toàn luật chơi. Nó không còn là một cỗ máy cơ khí đơn thuần chờ nhận lệnh, mà là sự hội tụ giữa “bộ não” suy luận ngữ nghĩa và “hệ điều hành cơ bắp” vật lý.
Dưới góc nhìn chiến lược của RobotWorks.vn, chúng ta sẽ bóc tách sự thật kỹ thuật đằng sau cỗ máy này, bỏ qua những lời ca ngợi viển vông để nhìn thẳng vào bản chất công nghệ.
1. Phần Cứng Cơ Khí: Bài Toán Truyền Động Và Độ Tự Do Tại Khớp Nối
Để một con robot rẽ ngang từ nhà máy sản xuất (môi trường có cấu trúc) bước vào đời sống thực tế (môi trường phi cấu trúc), phần cứng cơ khí phải đạt đến một giới hạn dung sai cực thấp.

- Sự thật về Độ tự do (Degrees of Freedom – DoF): Figure 01 sở hữu hệ thống động học phức tạp với hơn 40 DoF trên toàn cơ thể. Tuy nhiên, điểm ăn tiền không nằm ở số lượng khớp nối, mà ở tay gắp động học (Dynamic Hand). Việc cầm một quả táo mà không làm dập nó, hay rót cà phê không bị đổ, đòi hỏi các cảm biến lực (Force/Torque sensors) tại đầu ngón tay phải phản hồi tính bằng mili-giây.
- Mô-men xoắn và Sự cân bằng: Khác với robot công nghiệp dạng cánh tay (như KUKA hay Fanuc) được bắt vít chặt xuống sàn, Humanoid phải liên tục chống lại trọng lực. Hệ thống truyền động (Actuators) của Figure 01 phải giải quyết bài toán tính toán động lực học nghịch đảo (Inverse Dynamics) theo thời gian thực để phân bổ mô-men xoắn xuống mắt cá chân và hông, giúp cỗ máy 60kg không bị đổ gục khi nhấc một vật nặng.
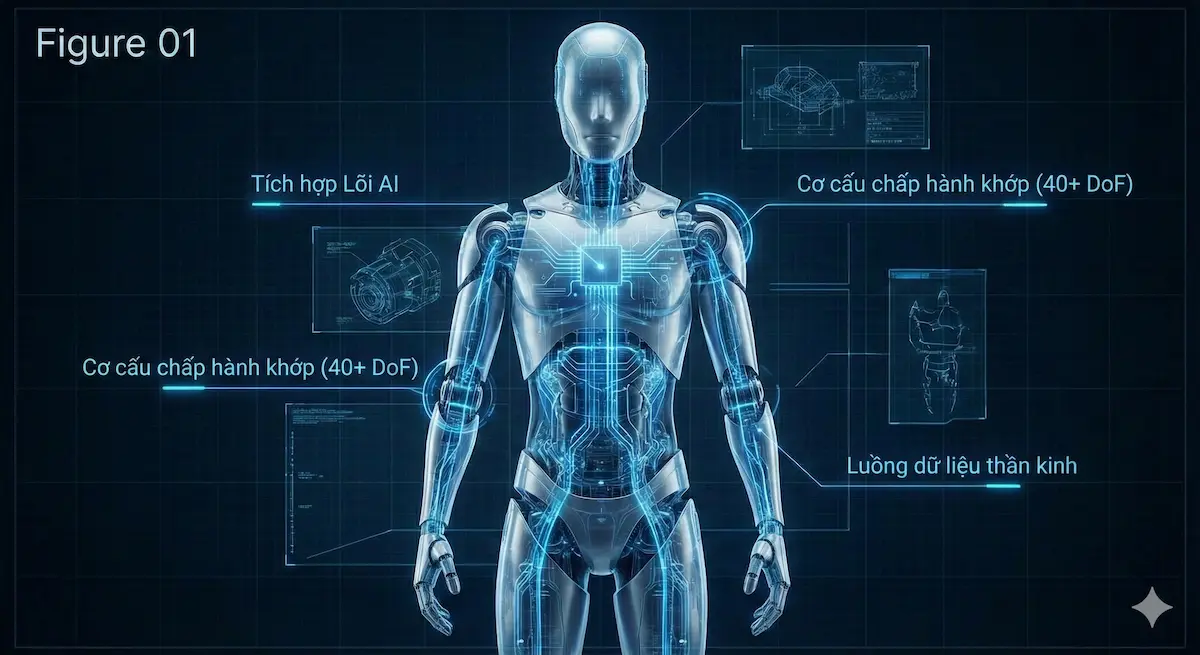
2. Trí Tuệ Nhân Tạo Lõi: Xử Lý Ngữ Nghĩa Và Phản Xạ Động Học Toàn Diện
Sự khác biệt lớn nhất của Figure 01 không nằm ở lớp vỏ kim loại, mà ở cách nó xử lý thông tin. Các thế hệ robot cũ hoạt động theo logic tuyến tính (if-then): “Nếu thấy vật A -> di chuyển cánh tay góc X -> đóng ngón tay lực Y”. Logic này hoàn toàn sụp đổ trong môi trường thực tế.
Figure 01 sử dụng mạng nơ-ron Vision-Language-Action (VLA) với phương pháp học máy End-to-End (Từ đầu cuối đến đầu cuối):
- Đầu vào (Input): Chỉ gồm hình ảnh từ camera quang học (Pixel) và giọng nói của con người.
- Xử lý (Processing): Mô hình của OpenAI đóng vai trò như thùy trán của con người. Khi nhận lệnh “Tôi đói”, AI không tìm kiếm một đoạn code lập trình sẵn. Nó phân tích ngữ cảnh, nhìn quanh bàn, nhận diện quả táo là đồ ăn duy nhất, và tự lập kế hoạch hành động.
- Đầu ra (Output): Các tín hiệu thần kinh số này lập tức dịch thẳng thành góc quay động cơ (Motor torque) ở cấp độ 200 Hz (200 lần mỗi giây).
Đây là bước nhảy vọt từ “Tự động hóa lập trình” sang “Trí tuệ tự chủ”.
3. Lên bàn cân: Figure 01 vs. Tesla Optimus
Là những người định hướng dữ liệu, chúng ta cần so sánh Figure 01 với đối thủ lớn nhất của nó trên bản đồ tiến hóa: Tesla Optimus.
- Tư duy tiếp cận: Tesla mang tư duy của một nhà sản xuất ô tô vĩ đại. Optimus được thiết kế tối ưu cho sản xuất hàng loạt (Mass Production) với các bộ truyền động tùy chỉnh tự “trồng” tại nhà máy nhằm ép giá thành (CapEx) xuống mức dưới 20.000 USD. Trong khi đó, Figure 01 đi theo hướng tích hợp tư duy (Neural Integration), mượn sức mạnh phần mềm lõi của OpenAI để giải quyết bài toán nhận thức chung (General-purpose) trước khi tính đến chuyện tối ưu giá.
- Vấn đề tồn đọng: Dù truyền thông có tâng bốc ra sao, cả hai vẫn đang đối mặt với giới hạn vật lý của thị trường hiện tại: Mật độ năng lượng của Pin. Để duy trì sức mạnh tính toán AI tại biên (Edge Computing) và nuôi hệ thống motor toàn thân, thời lượng pin thực tế cho các tác vụ nặng vẫn chưa thể đáp ứng trọn vẹn 1 ca làm việc 8 tiếng liên tục mà không cần sạc giữa chừng.

4. Tầm nhìn 2030: Từ phòng Lab đến kho bãi Việt Nam
Công nghệ này không chỉ để trình diễn. Hãy hình dung vào năm 2030, khi các siêu dự án logistics bao quanh sân bay Long Thành đi vào vận hành tối đa. Sự thiếu hụt nhân sự bốc dỡ, phân loại hàng hóa vào các ca đêm sẽ được lấp đầy bởi các Humanoid chạy bằng mô hình ngôn ngữ lớn.
Khi đó, bài toán không còn là mua robot ở đâu, mà là doanh nghiệp nào có khả năng tính toán TCO (Tổng chi phí sở hữu) chuẩn xác nhất để quyết định giữa việc “mua đứt” (CapEx) hay “thuê nhân sự robot” (RaaS – Robot as a Service).
RobotWorks.vn sẽ tiếp tục bám sát các chỉ số đo lường thực tế (năng suất, chi phí bảo trì, độ trễ hệ thống) của các thế hệ Humanoid này, cung cấp cho các nhà quản lý một bức tranh dữ liệu minh bạch nhất, loại bỏ hoàn toàn các “ảo mộng” công nghệ không mang lại giá trị thực tiễn.

{kind=link}