
Lưu ý Y tế: RobotWorks.vn phân tích thiết bị dưới góc độ năng suất và kỹ thuật cơ khí, tuyệt đối không cung cấp tư vấn y khoa hay đánh giá phác đồ điều trị lâm sàng.
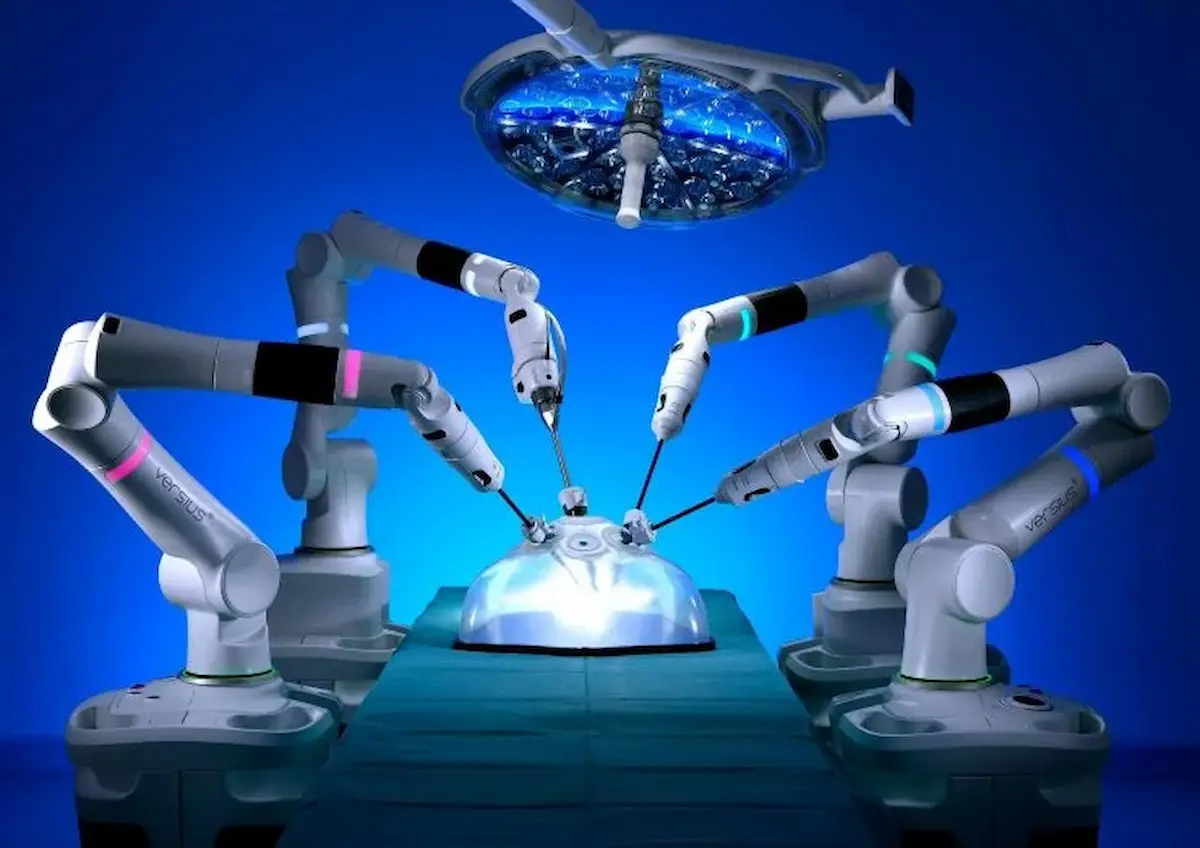
Trong phần đánh giá Bản mô tả công việc (JD) trước đó, chúng ta đã thấy ứng viên Versius của CMR Surgical ghi điểm tuyệt đối nhờ cấu trúc phân mảnh linh hoạt. Tuy nhiên, dưới lăng kính của một “Robot HR Agency”, không có bất kỳ nhân sự nào hoàn hảo. Mọi lợi thế cơ khí đều đi kèm với một bài toán đánh đổi (Trade-off).
Sự tự do của 4 trạm tay máy độc lập vô tình tạo ra một bài toán quản trị không gian cực kỳ khắt khe. Nếu Ban quản lý bệnh viện chỉ nhìn vào khả năng gắp nhả mà bỏ qua các rào cản tích hợp vật lý, năng suất phòng mổ sẽ sụt giảm nghiêm trọng.
1. Nút thắt thời gian: Quá trình thiết lập và Đường cong học tập, rào cản robot Versius
Chỉ số hiệu năng (KPI) đầu tiên của mọi robot y tế là thời gian chuyển đổi từ lúc bệnh nhân vào phòng đến khi kíp mổ chính thức thao tác. Với cấu trúc rời rạc, Versius đòi hỏi một quy trình thiết lập vị trí (Docking time) phức tạp hơn hẳn các hệ thống nguyên khối như Da Vinci Xi.

- Điểm mù vận hành: Dữ liệu từ các thử nghiệm lâm sàng (như COMPAR-P Trial) cho thấy, trong giai đoạn đầu triển khai tại các bệnh viện mới, thời gian thiết lập của Versius có thể dao động từ 15 đến 26 phút (tùy thuộc vào độ phức tạp của ca mổ), nhỉnh hơn so với mức trung bình 8-14 phút của các hệ thống đối thủ.
- Nguyên nhân kỹ thuật: Thay vì có một trục trung tâm tự động căn chỉnh tọa độ, đội ngũ phụ mổ phải tự tay đẩy từng Trạm tay máy (BSU) vào đúng vị trí, khóa phanh, và thực hiện chu trình “hiệu chuẩn cổng” (Port training). Hệ thống buộc phải tự học quỹ đạo để tạo ra một tâm xoay ảo (Remote Center of Motion – RCM) nhằm tránh làm rách mô tại vết rạch.
Đánh đổi để tối ưu: Dù mất nhiều thời gian ban đầu, đây không phải là một khiếm khuyết phần cứng vĩnh viễn mà là một “đường cong học tập” (Learning Curve). Các báo cáo chỉ ra rằng, sau khoảng 15 đến 20 ca phẫu thuật, khi kíp mổ đã quen với kỷ luật hình học, thời gian thiết lập giảm mạnh xuống chỉ còn khoảng 11 đến 13 phút, tiệm cận với tốc độ tiêu chuẩn của ngành.
2. Xung đột không gian: Hiện tượng va chạm cơ khí
Sự đánh đổi lớn nhất của thiết kế mô-đun là nguy cơ xảy ra va chạm cơ khí (Clashing) giữa các cánh tay robot khi làm việc trong vùng không gian chật hẹp.
Vì Versius định hình là hệ thống độc lập, nó không sở hữu “mạng lưới nhận thức không gian tổng thể” (Collision avoidance) bằng phần mềm mạnh mẽ như hệ thống nguyên khối. Các cánh tay không tự động tính toán được thể tích vật lý của nhau để tự né tránh.
- Rào cản thực chiến: Trong một số nghiên cứu đặc thù ở vùng không gian siêu hẹp (như phẫu thuật phụ khoa ổ bụng nhỏ hoặc nhi khoa), tỷ lệ ghi nhận có va chạm cơ khí bên ngoài (External arm clash) có thể lên tới 59,5%.
- Tuy nhiên, phần lớn đây là các va chạm cường độ thấp (Low-impact) không gây rách mô màng. Rủi ro va chạm cường độ cao (High-impact clashing) thường chỉ xảy ra khi kỹ thuật viên phá vỡ các nguyên tắc hình học tối thiểu: Ví dụ như đặt cổng trocar (vết rạch) cách vùng mô mục tiêu dưới 15 cm, hoặc đặt phần đế của trạm BSU cách bàn mổ dưới 40 cm.
Để giải quyết triệt để rào cản này, hệ thống Versius yêu cầu đội ngũ phụ mổ đóng vai trò là “mắt thần”. Họ phải liên tục giám sát không gian và yêu cầu bác sĩ bấm nút nhả khớp (Clutching) để định tuyến lại góc khuỷu tay của robot, đồng thời chuẩn hóa lại quy trình tính toán tọa độ cổng (Port placement) ngay từ khâu chuẩn bị.
3. Giới hạn tầm vươn và Lỗ hổng khí tài
Bên cạnh bài toán không gian ngang, năng lực trục dọc của Versius cũng có những giới hạn nhất định. Chiều dài cánh tay thao tác thực tế của hệ thống dừng ở mức xấp xỉ 38 cm.
Thông số này tạo ra rào cản khi hệ thống phải xử lý các quy trình cần tầm vươn sâu (Deep pelvic access) ở những bệnh nhân có chỉ số khối cơ thể (BMI) cao, hoặc các ca phẫu thuật đòi hỏi di chuyển qua nhiều vùng ổ bụng (Multi-quadrant). Thay vì hệ thống có thể tự vươn dài thanh trượt, đội ngũ y tế nhiều lúc phải tháo tay máy ra và di chuyển cắm lại (Redocking) ở một cổng trocar thấp hơn, gây gián đoạn quy trình.
Hơn thế nữa, do định hướng ban đầu là tối ưu sự gọn nhẹ, bộ khí tài của Versius hiện chủ yếu tập trung vào các công cụ nội soi cốt lõi (kẹp, kéo, kìm mang kim). Việc thiếu hụt các cụm tay gắp ghim tự động (Robotic staplers) tiên tiến buộc nhiều ca phẫu thuật phức tạp (như cắt bỏ đại trực tràng) phải diễn ra theo hình thức “tích hợp lai” (Hybrid procedures), robot đảm nhận việc bóc tách, trong khi phụ mổ vẫn phải dùng dụng cụ bấm ghim cầm tay thủ công để hoàn thành quy trình.
Đánh giá từ ROWOR
Dưới góc nhìn quản trị năng suất, Versius là một ứng viên thực dụng nhưng cực kỳ “kén” không gian. Cỗ máy này không sinh ra để thay thế tư duy sắp xếp của con người. Nó đòi hỏi kíp mổ phải có kỷ luật hình học (Spatial geometry) khắt khe. Những giới hạn về va chạm cơ khí hay thời gian thiết lập ban đầu hoàn toàn có thể được khắc phục triệt để khi đội ngũ y tế vượt qua được đường cong học tập.
Tuy nhiên, câu hỏi cốt lõi mang tính sinh tử đối với Ban Giám đốc Bệnh viện không chỉ nằm ở khả năng vận hành kỹ thuật. Tại sao dù mang trong mình những rào cản tích hợp đòi hỏi khắt khe, Versius vẫn có thể phủ sóng và đạt cột mốc hơn 45.000 ca mổ trên toàn cầu? Câu trả lời không nằm ở con chip hay cảm biến, mà nằm ở “Mô hình trả phí theo ca” giúp cắt giảm CAPEX ban đầu.
Chúng ta sẽ cùng mổ xẻ bảng cân đối kế toán của nhân sự này trong Bài 3: Bài toán Hoàn vốn (ROI): Bóc tách cấu trúc tài chính của Robot Versius.
/ Chuỗi bài về robot Versius
- Bài 1: Đánh giá Robot Phẫu thuật CMR Versius: Bản Mô Tả Công Việc (JD) Kỹ Thuật
- Đang đọc bài 2: Rã máy Robot Versius: Bóc Tách Điểm Mù Không Gian Và Rào Cản Tích Hợp
- Bài 3: Bài Toán Hoàn Vốn (ROI): Bóc Tách Cấu Trúc Tài Chính Robot Versius

{kind=link}