
Trên các bảng thông số kỹ thuật (Datasheet) của robot công nghiệp, nhà sản xuất luôn in đậm một con số: Độ lặp lại (Repeatability) >= 0.1 mm. Đây là một cú lừa thị giác hoàn hảo. Thông số cốt lõi quyết định sự thành bại của một dây chuyền gia công chính xác lại nằm ở một dòng chữ thường bị giấu nhẹm: Độ chính xác tuyệt đối (Absolute Accuracy), trung bình dao động từ 0.5 đến 1.5 mm.
Dưới lăng kính quản trị nhân sự tự động hóa của RobotWorks.vn, việc tuyển dụng một robot có độ lặp lại cao nhưng độ chính xác tuyệt đối thấp giống hệt như việc thuê một nhân viên vô cùng mẫn cán: Anh ta có khả năng lặp đi lặp lại một sai lầm một cách hoàn hảo.
Bản Chất Của Sai Số Tuyệt Đối: Tại Sao Thông Số Nhà Sản Xuất Thường Khác Thực Tế?
Trong môi trường sản xuất linh hoạt (High-mix, Low-volume), Lập trình ngoại tuyến (OLP – Offline Programming) là kỹ năng sinh tồn. Năng lực OLP giống như việc “ứng viên” robot có thể tự học quy trình mới qua tài liệu mô phỏng từ xa mà không cần dừng chuyền.
Tuy nhiên, sai lệch 1.5 mm giữa không gian ảo (CAD/CAM) và thực tế xưởng sẽ lập tức phá vỡ ảo tưởng này. Hậu quả trực tiếp đối với tỷ suất hoàn vốn (ROI):
- Re-teaching (Dạy lại thủ công): Kỹ sư lập trình buộc phải dừng máy để căn chỉnh lại tọa độ cho từng mũi hàn, đầu gắp. Tốc độ chuyển đổi mã hàng bằng 0.
- Hội chứng Pilot Purgatory: Các dự án nâng cấp tự động hóa vĩnh viễn mắc kẹt ở giai đoạn thử nghiệm. Bản vẽ mô phỏng chạy trơn tru, nhưng đưa ra thực tế lại tạo ra hàng loạt phế phẩm do sai lệch tọa độ.
- Chi phí Downtime: Khấu hao máy móc vẫn tính, nhưng sản lượng không sinh ra do hệ thống phải dừng để chờ con người “cầm tay chỉ việc”.
Lập Trình Ngoại Tuyến: Giải Pháp Giảm Thiểu Thời Gian Chết Trong Sản Xuất
Tiêu chuẩn đo lường ISO 9283 chỉ kiểm tra robot trong trạng thái độc lập và lý tưởng. Thực tế xưởng sản xuất tàn khốc hơn nhiều. Sự sai lệch 1.5mm bắt nguồn từ những lỗ hổng phần cứng và thuật toán sau:
1. Ma trận Động học và Sai số chế tạo
Bộ điều khiển robot tính toán quỹ đạo dựa trên Tham số Denavit-Hartenberg (DH Parameters) lý tưởng. Tuy nhiên, gia công cơ khí luôn có sai số. Sự bất đồng bộ giữa ma trận toán học ảo và khung xương kim loại thật tạo ra sai lệch tích lũy tại mỗi khớp nối trước khi truyền đến đầu cuối.
2. Sự biến dạng của Điểm thao tác (TCP) dưới tải trọng động
Khi đánh giá năng lực, không thể nhìn vào trạng thái tĩnh. Khi gắp một phôi thép 10kg và di chuyển với gia tốc cao, cánh tay đòn chịu mô-men xoắn cực lớn tạo ra độ võng cơ khí (deflection). Sai số tuyệt đối tại TCP lúc này có thể vượt xa con số 1.5mm công bố.
3. Sát thủ tàng hình: Biến dạng nhiệt (Thermal Drift)
Đây là yếu tố chí mạng tại môi trường xưởng gia công Việt Nam. Khí hậu nóng ẩm, kết hợp với ma sát sinh nhiệt từ hộp số giảm tốc sau 4-6 giờ vận hành liên tục khiến kim loại giãn nở. Một robot có thể đạt sai số 0.5mm vào ca sáng, nhưng trượt dài lên 2mm vào ca chiều. Phong độ của “ứng viên” này hoàn toàn không ổn định.
4. Giới hạn Hộp số & Cảm biến
Sự hao mòn cơ học là không thể tránh khỏi. Các hệ khớp nhỏ dùng hộp số Harmonic Drive rất dễ bị rơ (backlash) sau một thời gian vận hành do giới hạn của linh kiện đàn hồi, trong khi hộp số RV/Cycloidal ở khớp gốc lại chịu tải nặng liên tục.
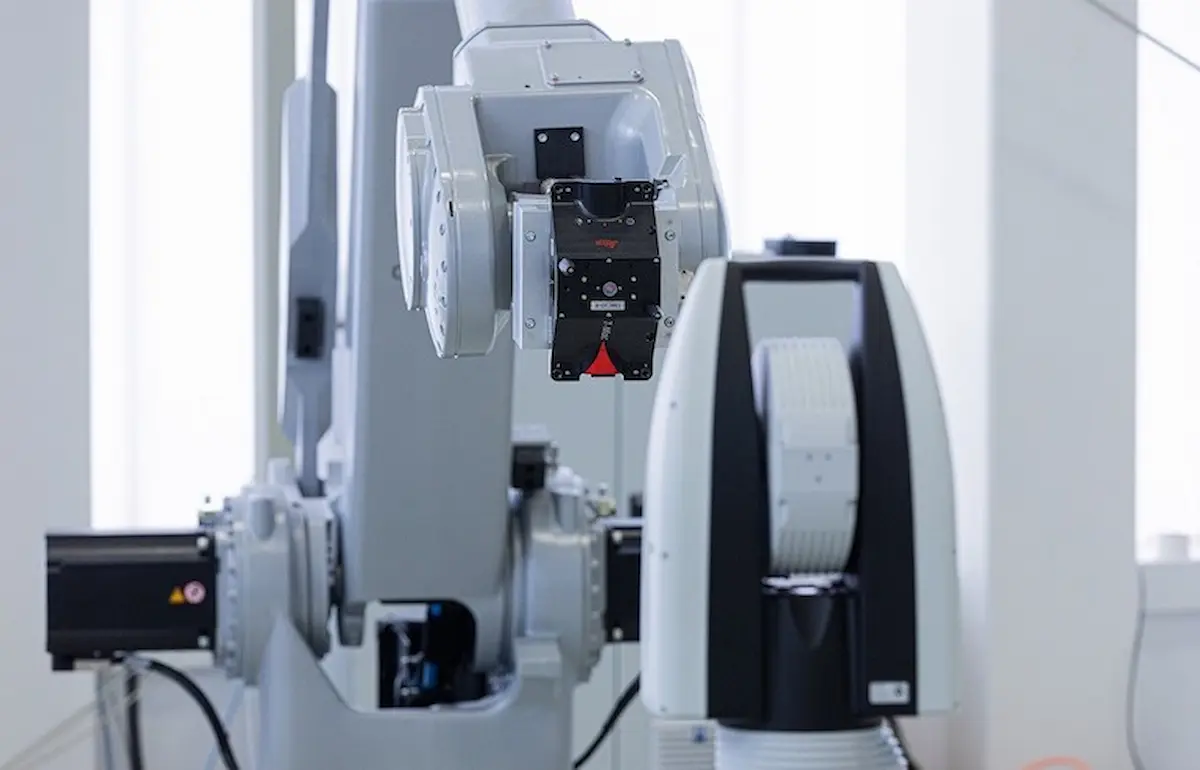
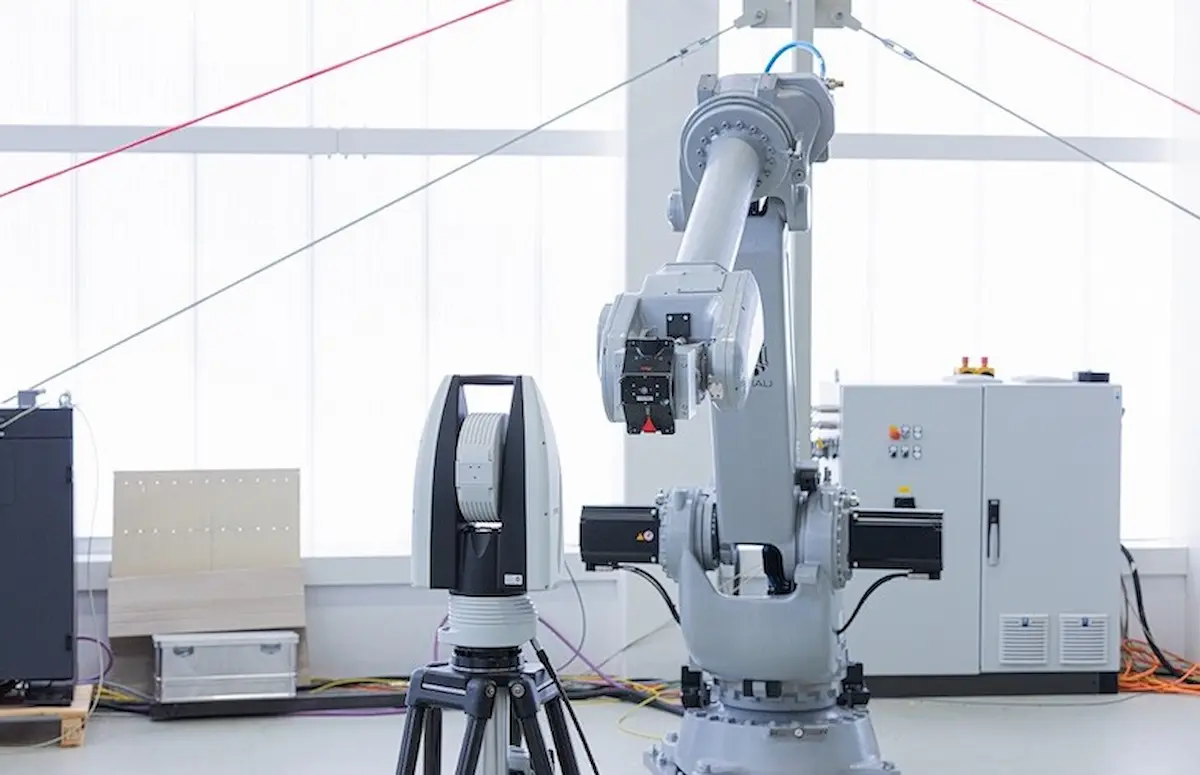
Để bóc trần những sai lệch này trên các hệ thống vòng kín (closed-loop), viện Fraunhofer IPA đã phải loại bỏ ISO 9283, dùng hệ thống đo laser Leica Absolute Tracker AT960 (sai số chỉ +- 40 µm) kết hợp “máy đếm nhịp” (metronome) để ép hệ thống bộc lộ độ trễ phản hồi.
Hiệu Chỉnh Robot: Chìa Khóa Để Tăng Độ Chính Xác Và Tối Ưu Năng Suất
Làn sóng dịch chuyển chuỗi cung ứng năm 2026 đang ép các nhà máy tại Việt Nam phải nâng cấp từ lắp ráp cơ bản sang gia công phụ trợ chính xác cao (điện tử, linh kiện bán dẫn, vi mạch xe điện). Việc các giám đốc nhà máy mù quáng ký duyệt mua sắm dựa trên thông số “độ lặp lại 0.1mm” đang ném hàng tỷ đồng qua cửa sổ.
Đến năm 2030, khi các mô hình AI tự học (Reinforcement Learning) làm chủ dây chuyền, tiêu chuẩn tuyển dụng robot sẽ loại bỏ hoàn toàn các dòng máy hở vòng (open-loop). “Ứng viên” lý tưởng phải sở hữu hệ thống bù trừ sai số thời gian thực (Real-time compensation):
- Trang bị bộ mã hóa tuyệt đối thứ cấp (Secondary Absolute Encoders) từ các hãng như Heidenhain hay Renishaw đặt trực tiếp tại khớp xuất.
- Tích hợp giao thức truyền thông độ trễ cực thấp như EtherCAT để giao tiếp với hệ điều hành ROS 2.
- Khả năng hiệu chỉnh quỹ đạo động dựa trên dữ liệu từ Cảm biến lực (Force/Torque sensors) và Thị giác máy tính (Machine Vision).
Nhân sự Robot & Bài toán Năng suất thực chiến
Đừng biến ngân sách tự động hóa thành chi phí bảo trì cho những cỗ máy sai lệch. RobotWorks.vn cung cấp “Thông tin hiệu năng thực chiến và Khấu hao sai số” của các dòng robot công nghiệp phổ biến tại Việt Nam, đo lường bằng Data Journalism độc lập, không bị chi phối bởi nhà sản xuất.

{kind=link}