
Thị trường xây dựng cao tầng luôn đối mặt với một nút thắt cổ chai mang tính rủi ro cao: công đoạn lắp đặt chốt neo mặt tiền (glazing brackets). Việc treo mình ở độ cao hàng trăm mét không chỉ đẩy rủi ro an toàn lao động lên mức tối đa mà còn phơi bày giới hạn công thái học của con người. Theo dữ liệu thực chiến từ nhà thầu Harmon (Mỹ), khoảng 30% số lượng chốt neo lắp đặt thủ công thường bị sai lệch vị trí, dẫn đến chi phí khắc phục khổng lồ.
Dưới lăng kính của một “Đại lý Nhân sự Robot” (Robot HR Agency), nền tảng thi công tự động của Raise Robotics tích hợp cánh tay cobot UR20 không đơn thuần là một cỗ máy. Đây là một “ứng viên” có năng lực chuyên biệt, giải quyết triệt để bài toán công thái học và tái định hình lại Bản mô tả công việc (JD) của ngành thi công nhôm kính.
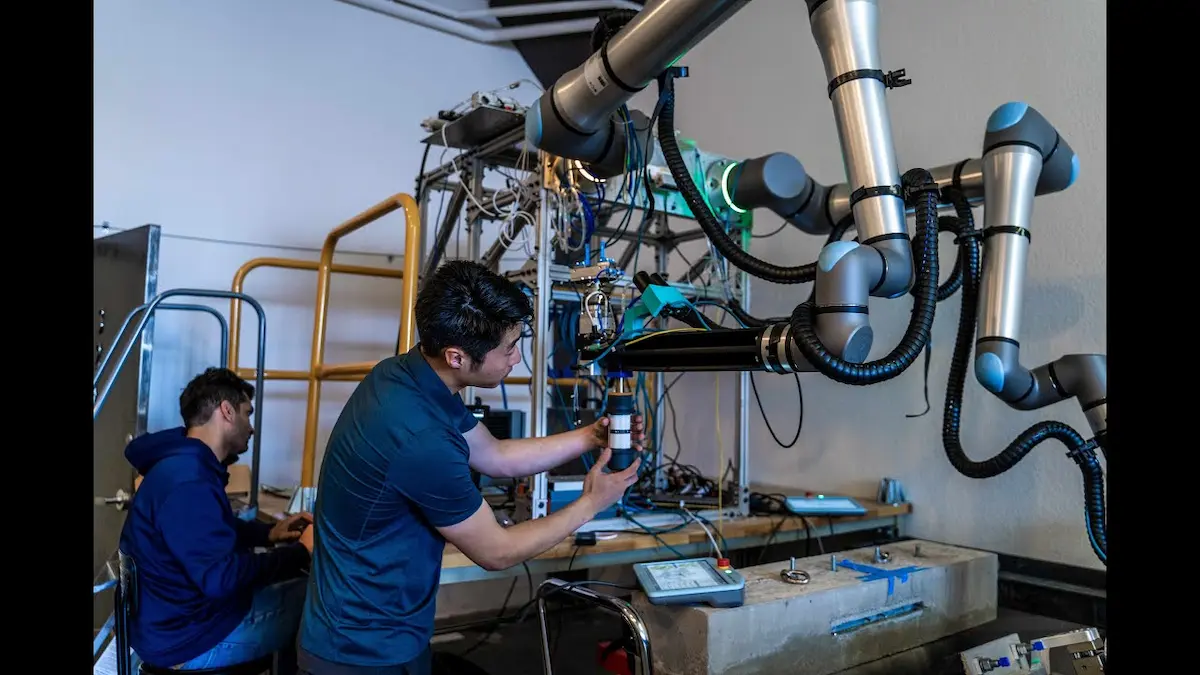
Phân tích cấu trúc phần cứng: Khả năng nâng dỡ vật liệu và tầm vươn tối đa

Bỏ qua các thông số quảng cáo bề nổi, hiệu năng của “ứng viên” này được cấu thành từ những nền tảng cơ điện tử cốt lõi sau:
- Động học (Kinematics) & Bài toán Trọng tâm: Tại sao lại là UR20? Chìa khóa nằm ở sự kết hợp giữa Tải trọng (Payload) 20kg và Tầm với (Reach) 1750mm. Tầm với dài cho phép bệ xe di động (Mobile Base) đứng an toàn sâu bên trong sàn bê tông, vươn cánh tay tích hợp bộ dụng cụ EOAT (End-of-Arm Tooling) qua mép lan can để thao tác. Trọng tâm (Center of Gravity) của toàn bộ hệ thống luôn được giữ ổn định, loại bỏ hoàn toàn nguy cơ lật bệ.
- Dung sai thi công thực chiến vs. Độ lặp lại: Bản thân cánh tay cobot UR20 sở hữu độ lặp lại vị trí (Pose repeatability) cực tĩnh ở mức ±0.05 mm. Tuy nhiên, trong động học môi trường hở (rung chấn sàn bê tông, xê dịch bệ bánh xe), Raise Robotics đã tích hợp hệ thống trắc địa Total Station để khóa dung sai thi công tổng thể ở mức ±4.7mm (3/16 inch). Đây là con số thực dụng, giải quyết triệt để tỷ lệ 30% sai lệch của lao động thủ công.
- Độc lập năng lượng & Hệ thống BMS: UR20 (hoạt động ở công suất lớn) đòi hỏi nguồn điện khắt khe. Hệ thống không chỉ cắm vào ắc quy đơn thuần, mà được tích hợp một hệ thống Quản lý năng lượng (BMS) tinh gọn, cho phép chuyển đổi và cung cấp nguồn DC cực kỳ ổn định. Điều này đảm bảo không xảy ra hiện tượng sụt áp khi các khớp xả lực xoắn (torque) tối đa để khoan và siết ốc, đồng thời giúp hệ thống vận hành không dây 100%.
- Tối ưu Uptime & Khả năng sinh tồn: Đạt chuẩn kháng bụi/nước IP65 và chịu đựng dải nhiệt độ từ -28.8°C đến 48.8°C. Không bị giới hạn bởi thời tiết hay thể lực (không có downtime sinh học), robot có thể duy trì Uptime liên tục qua nhiều ca làm việc.
Đo lường sự thật kỹ thuật: Tải trọng hữu ích và hao hụt điện năng tại công trường
Việc “tuyển dụng” hệ thống này là một bài toán cấu trúc lại Tổng chi phí sở hữu (TCO) và quỹ lương trực diện của doanh nghiệp.
| TIÊU CHÍ | Thi công thủ công truyền thống | Thi công bằng hệ thống Raise Robotics |
| QUY MÔ NHÂN SỰ | 2 - 4 thợ lắp đặt đu dây ngoài lan can | 1 Kỹ thuật viên giám sát (Robot Supervisor) |
| MÔI TRƯỜNG LÀM VIỆC | Rủi ro cao, phụ thuộc thời tiết, giới hạn thể lực | An toàn bên trong tòa nhà, duy trì Uptime tối đa |
| ĐÒN BẨY NĂNG SUẤT | Tiêu chuẩn 1x | Tăng gấp 3 lần (3x multiplier) |
Tỷ suất hoàn vốn (ROI): Điểm mấu chốt thuyết phục các Giám đốc Dự án là bài toán dòng tiền. Với mô hình thuê bao phần cứng (Hardware-as-a-Service/Leasing) hàng tháng, Harmon báo cáo hệ thống đạt điểm hòa vốn (breakeven) ngay sau khi hoàn thành lắp đặt hệ thống neo cho một dự án cao 13 tầng. Bắt đầu từ tầng thứ 14, mọi giá trị thặng dư từ việc cắt giảm chi phí nhân sự, bảo hiểm rủi ro và chi phí sửa lỗi sẽ chuyển hóa trực tiếp thành biên lợi nhuận ròng.
Bản mô tả công việc: Ứng dụng tiêu chuẩn trong lắp đặt kính cao tầng
Giá trị dài hạn của nền tảng này không chỉ nằm ở tốc độ siết ốc. Nó nằm ở khả năng số hóa hồ sơ thi công.
Thay vì quy trình nghiệm thu xác suất thủ công, hệ điều hành (dựa trên các kiến trúc thời gian thực – Real-time OS) tự động ghi nhận tọa độ chính xác và lực siết của từng bản lề. Dữ liệu này tạo ra một bộ hồ sơ “as-built” (hoàn công) hoàn hảo. Đột phá hơn, dữ liệu này có thể được đổ thẳng vào mô hình Digital Twin (Bản sao kỹ thuật số) của tòa nhà, phục vụ công tác bảo trì (Facility Management) trong suốt 50 năm vòng đời công trình tiếp theo.

Bài toán chi phí đầu tư (CAPEX) và tỷ suất hoàn vốn cho nhà thầu
Nói sự thật kỹ thuật: Cỗ máy này không có phép màu. Việc mang phần cứng về thả vào công trường không đồng nghĩa với việc có ngay năng suất 3x. Rất nhiều doanh nghiệp rơi vào trạng thái “Pilot Purgatory” (thử nghiệm mãi không thể mở rộng) vì năng lực quản trị dữ liệu yếu kém.
Hệ thống của Raise Robotics thực chất bị “mù” nếu hạ tầng dữ liệu đầu vào có vấn đề. Khác với con người có thể tự đánh giá bằng mắt thường khi thấy vách kính có dấu hiệu lệch, robot không có tư duy phản biện. Nếu kỹ sư nạp sai dữ liệu đầu vào, robot sẽ miệt mài khoan và siết ốc sai một cách “cực kỳ chính xác” – với tốc độ phá hoại nhanh gấp 3 lần bình thường.
Do đó, chi phí ẩn lớn nhất ở đây là chi phí đào tạo (Upskill). Nhà thầu không cần sa thải thợ thủ công, nhưng buộc phải nâng cấp họ thành các “Quản lý giám sát robot”. Từ những người thợ cầm máy khoan, họ phải học cách đọc hiểu giao diện máy, tương tác với hệ thống Total Station và xử lý các lỗi phần mềm cơ bản.
Tầm Nhìn 2030: Lời Giải Cho Đại Công Trường Việt Nam
Tại Việt Nam, các tổng thầu lớn (như Coteccons, Hòa Bình, Ricons) đang đối mặt với sức ép kép: sự thiếu hụt và già hóa của lực lượng thợ tay nghề cao, đi kèm với áp lực tuân thủ tiêu chuẩn an toàn lao động quốc tế ngày càng khắt khe.
Tầm nhìn đến năm 2030, việc ứng dụng cobot thi công mặt tiền tại các đại công trường đô thị sẽ chuyển từ trạng thái “phô diễn công nghệ” sang “tiêu chuẩn đấu thầu bắt buộc”. Khi chi phí nhân công tiếp tục tăng và chi phí tiếp cận phần cứng giảm dần, việc từ chối các “nhân sự robot” trong những hạng mục rủi ro cao đồng nghĩa với việc doanh nghiệp tự tước đi năng lực cạnh tranh và biên lợi nhuận của chính mình.

{kind=link}