
Trong quản trị vận hành, việc đưa một robot vào môi trường thực tế mà không hiểu rõ cấp độ điều hướng của nó là một sai lầm tài chính nghiêm trọng. Tại RobotWorks, chúng tôi định nghĩa điều hướng không chỉ là việc di chuyển từ điểm A đến B, mà là Bản hồ sơ năng lực nhận thức (Cognitive Competency) của một nhân sự máy.
Dưới đây là sự phân tách rạch ròi giữa lời hứa marketing và sự thật kỹ thuật, dựa trên khung tham chiếu chuẩn hóa cho kỷ nguyên 2030.

1. Kiến trúc phần mềm: Từ dẫn đường vật lý đến nhận thức không gian toàn diện
Để đánh giá một “ứng viên”, chúng ta cần nhìn vào cách nó xử lý ma trận hiệp phương sai (Covariance Matrix) trong việc định vị và khả năng dung hợp cảm biến (Sensor Fusion).
Cấp độ 0 & 1: Robot “mù” và Robot “dừng” (Passive Navigation)
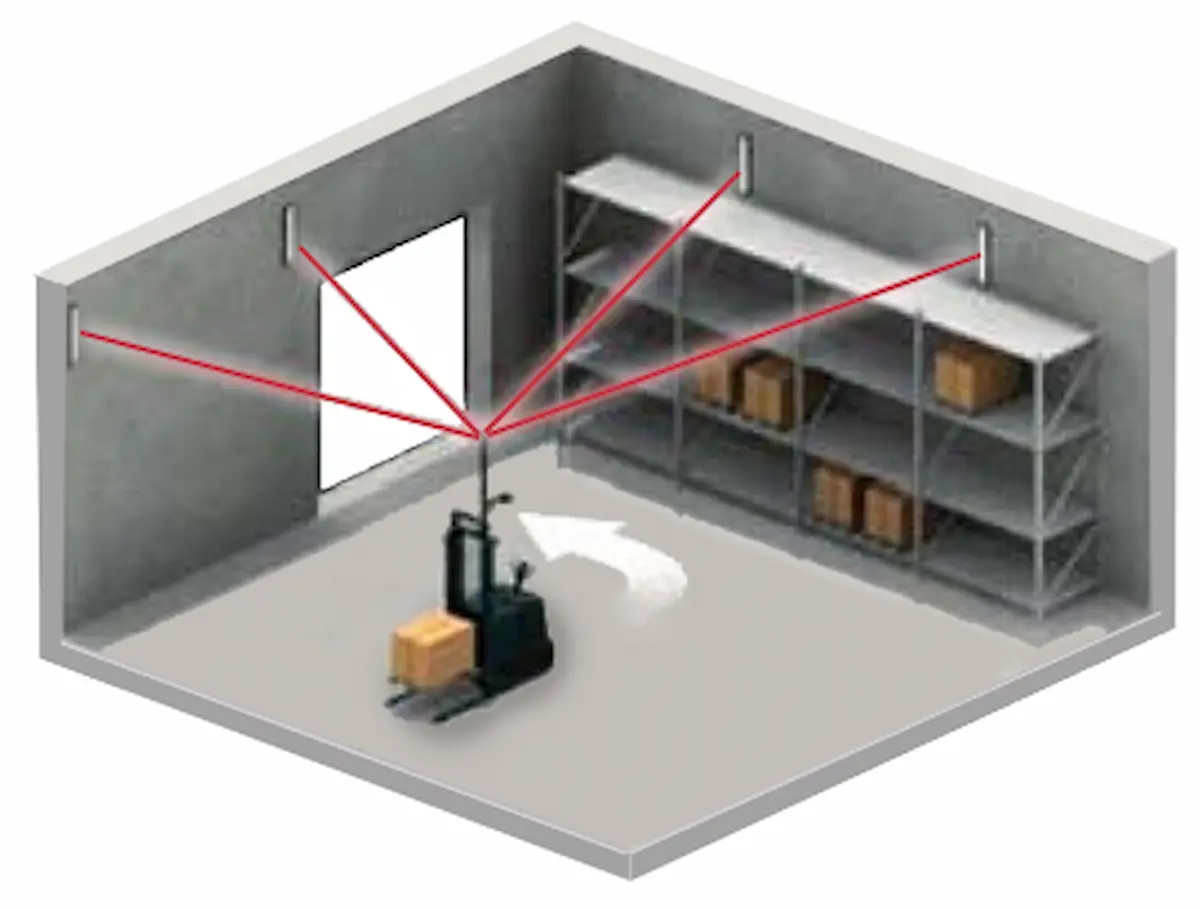
- Kỹ thuật: Chạy theo line từ tính hoặc mã QR. Cảm biến siêu âm (Ultrasonic) chỉ phục vụ mục đích dừng khẩn cấp.
- Hạn chế: Không có khả năng lập kế hoạch lại toàn cục (Global Re-planning).
- Thực tế: Đây chỉ là các thiết bị vận chuyển cơ học, không phải robot thông minh. Hiệu suất của chúng bằng 0 ngay khi có một vật cản tĩnh nằm trên lộ trình.
Cấp độ 2: SLAM sơ cấp và rủi ro “Map Drift” (Basic Autonomy)
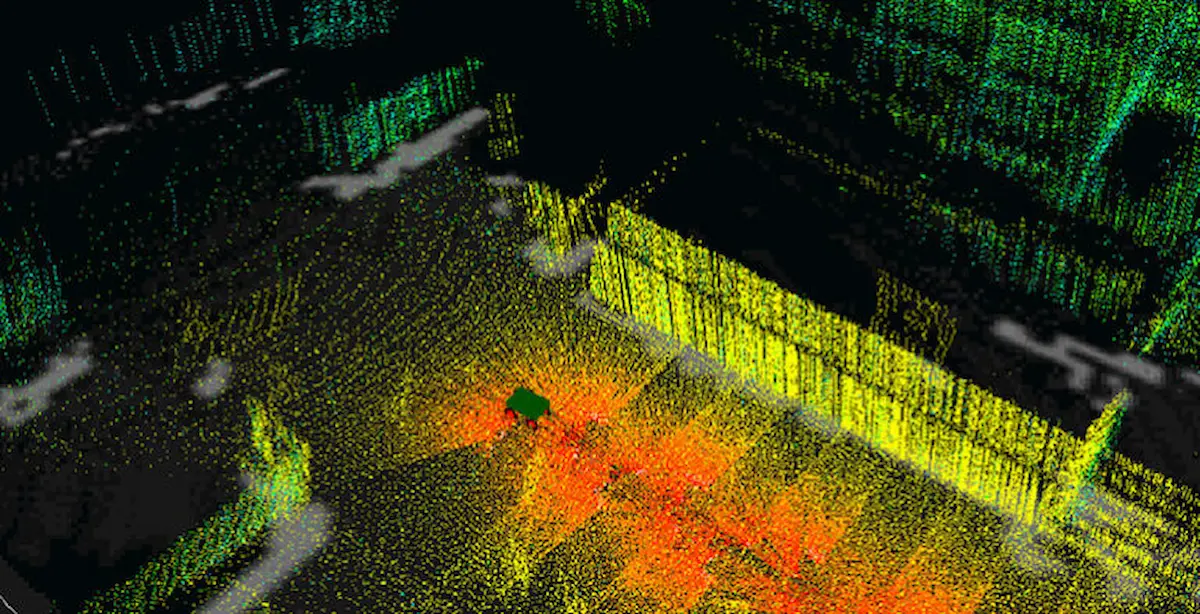
Robot bắt đầu có khả năng tự lập bản đồ (SLAM) bằng LiDAR 2D hoặc Camera Depth.
- Vấn đề kỹ thuật: Thường gặp hiện tượng Map Drift (trôi bản đồ) do sai số tích lũy từ Encoder bánh xe hoặc hộp số hành tinh có độ rơ lớn.
- Ngưỡng thất bại: Khi mật độ vật cản động vượt ngưỡng 0.5 vật thể/m², thuật toán sẽ rơi vào trạng thái “bế tắc tính toán”.
Cấp độ 3: Khả năng “tự chữa lành” và Kết nối hạ tầng
Đây là cấp độ “nhân sự chuyên nghiệp” tối thiểu cho môi trường Logistics thông minh.
- Kỹ thuật: Sử dụng ROS 2 kết hợp giao thức truyền thông thời gian thực DDS (Data Distribution Service).
- Năng lực: Robot tự động giao tiếp với thang máy qua API, có khả năng tự cập nhật bản đồ cục bộ khi cấu trúc kho bãi thay đổi nhẹ mà không cần kỹ thuật viên can thiệp.
Cấp độ 4: Invisible Autonomy – Tư duy dự đoán cấp cao
Đây là đỉnh cao của nhân sự robot, nơi máy móc và con người cộng sinh không xung đột.
- Phần cứng cốt lõi: Yêu cầu sức mạnh tính toán từ các dòng Chip AI chuyên dụng như NVIDIA Jetson Orin.
- Dự đoán quỹ đạo (Predictive Pathing): Robot không chỉ tránh vật cản; nó phân tích hướng di chuyển của con người và tính toán ma trận chi phí (Costmap) để chọn quỹ đạo tối ưu trước khi va chạm tiềm tàng xảy ra.
- Tiêu chuẩn: Đáp ứng khắt khe các quy định an toàn quốc tế như ISO 3691-4.

2. Sự thật kỹ thuật: Đo lường độ trễ xử lý và hao hụt điện năng (kWh) qua từng cấp độ
Việc lựa chọn robot Cấp độ 4 tại thị trường Việt Nam năm 2030 không phải là sở thích công nghệ, mà là bài toán tối ưu Cost-per-Meter (Chi phí trên mỗi mét di chuyển).
- Độ trễ xử lý (Latency): Một robot sử dụng chip xử lý rẻ tiền sẽ có độ trễ nhận thức cao, buộc phải giảm vận tốc di chuyển để đảm bảo an toàn, dẫn đến Throughput (Lưu lượng hàng hóa) thấp.
- Năng lượng: Robot Cấp độ 4 gánh các thuật toán Deep Learning nặng nề, đòi hỏi hệ thống quản lý Pin (BMS) cực kỳ hiệu quả để không bị đánh đổi giữa “thông minh” và “thời gian làm việc”.
3. Bản mô tả công việc (JD): Phân bổ mức độ tự chủ theo từng môi trường nhà kho
RobotWorks không tô hồng công nghệ. Ngay cả một “ứng viên” Cấp độ 4 vẫn có thể thất bại thảm hại trong các kịch bản sau:
- Bẫy vật liệu (The Glass Trap): LiDAR truyền thống hoàn toàn “mù” trước tường kính hoặc gương. Nếu không được trang bị thêm cảm biến siêu âm dải rộng hoặc Visual SLAM với thuật toán khử nhiễu ánh sáng, robot sẽ đâm trực diện vào vách kính khách sạn.
- Môi trường biến động cực cao (High-Dynamic Chaos): Trong một trung tâm thương mại giờ cao điểm, các thuật toán dự đoán quỹ đạo có thể bị “quá tải thông tin”, dẫn đến việc robot đứng im tại chỗ (Freezing Robot Problem) vì mọi hướng di chuyển đều bị ma trận rủi ro chặn lại.
- Bề mặt trơn trượt (Odometry Failure): Khi bánh xe bị trượt trên sàn ướt, dữ liệu Encoder sẽ sai lệch hoàn toàn so với thực tế. Nếu hệ thống lọc EKF (Extended Kalman Filter) không đủ mạnh để bù đắp bằng dữ liệu IMU, robot sẽ bị lạc ngay trong chính bản đồ của mình.
4. Bài toán chi phí đầu tư (CAPEX) và tỷ suất hoàn vốn (ROI) khi nâng cấp hệ thống
Khi bạn “tuyển dụng” một đội quân robot, đừng chỉ nhìn vào Brochure. Một nhân sự máy tốt phải có sự đồng bộ giữa Phần cứng bền bỉ (Cơ khí chuẩn) và Phần mềm nhạy bén (Lõi AI).
Để tránh lãng phí ngân sách, hãy thực hiện bài kiểm tra “3 Không” của RobotWorks:
- Không hỗ trợ: Robot có tự thoát khỏi bẫy góc tường mà không cần đẩy tay?
- Không mù lòa: Thử thách robot với vách kính và môi trường ánh sáng phức tạp.
- Không dừng chờ: Đo lường thời gian robot “do dự” khi có người đi cắt ngang mặt ở vận tốc 1.2m/s.
Kết luận: Robot Cấp độ 4 là tiêu chuẩn vàng của năm 2030, nhưng chỉ khi bạn hiểu rõ các giới hạn vật lý của chúng.

{kind=link}