
Sau khi đo lường năng lực sinh lời (Bài 1) và mổ xẻ phần cứng (Bài 2), chúng ta đã xác nhận Moxi là một thiết bị có năng lực thực chiến cao. Tuy nhiên, đối với một Giám đốc Công nghệ (CTO) hoặc Kiến trúc sư Hệ thống, thiết bị này không đơn thuần là một cỗ xe kéo. Bản chất của cỗ máy nặng 136 kg này là một “nút điện toán di động” liên tục tiêu thụ và truyền tải lượng lớn dữ liệu trong mạng lưới nội bộ phức tạp khi tích hợp robot Moxi vào bệnh viện.
Việc đưa một thiết bị IoT khổng lồ vào không gian y tế đòi hỏi sự chuẩn bị hạ tầng cực kỳ khắt khe. Dưới lăng kính bài toán đánh đổi, đây là những rào cản kỹ thuật mà các cơ sở y tế phải giải quyết triệt để trước khi vận hành.
Độ trễ Điều hướng và Tốc độ Chu kỳ tích hợp robot Moxi
Môi trường bệnh viện là một không gian bán cấu trúc (semi-structured), nơi các vật cản thay đổi liên tục: xe lăn, băng ca cấp cứu, và dòng người qua lại. Dữ liệu thực chiến cho thấy Moxi mất trung bình 25 đến 26 phút cho một chu kỳ giao hàng. Dù kết quả này tối ưu hơn việc dùng sức người, cỗ máy vẫn phải liên tục tự hạ tốc độ để đảm bảo an toàn trong khu vực đông đúc.
Độ trễ xử lý (Latency) ở đây không chỉ là câu chuyện của sóng Wi-Fi, mà là độ trễ động học. Khi một hành lang bị chặn kín, thiết bị phải dừng lại tính toán quỹ đạo mới. Trong các tình huống tắc nghẽn cục bộ (deadlocks), cỗ máy hoàn toàn có thể bị “kẹt cứng”, buộc phải chờ nhân viên y tế dẹp đường hoặc đợi chuyên viên can thiệp từ xa.
Nút thắt API và Hệ thống Thông tin Nội bộ
Để một thiết bị tự động không bị cô lập, nó bắt buộc phải giao tiếp được với Hệ thống Thông tin Bệnh viện (HIS – Hospital Information System) và các phần mềm quản lý kho. Lớp giao tiếp này được thực thi thông qua nền tảng đám mây bằng các giao thức API tiêu chuẩn.
Tuy nhiên, tài liệu kỹ thuật chỉ ra một nút thắt lớn về giới hạn lưu lượng gọi hàm (API Rate Limit). Các truy vấn đồng bộ dữ liệu thường bị giới hạn ở mức 20 requests/phút.
Nếu bệnh viện muốn mở rộng quy mô lên một đội xe (fleet) gồm hơn 15 thiết bị, việc liên tục gửi lệnh gọi thang máy, cập nhật vị trí và nhận lệnh từ phần mềm quản lý (như Epic hay Cerner) sẽ tạo ra điểm nghẽn dữ liệu cục bộ. Bên cạnh đó, việc chuyển đổi dữ liệu để máy “hiểu” được các tiêu chuẩn y tế phức tạp (như mức độ cách ly của từng phòng bệnh) vẫn là một rào cản lập trình không nhỏ.

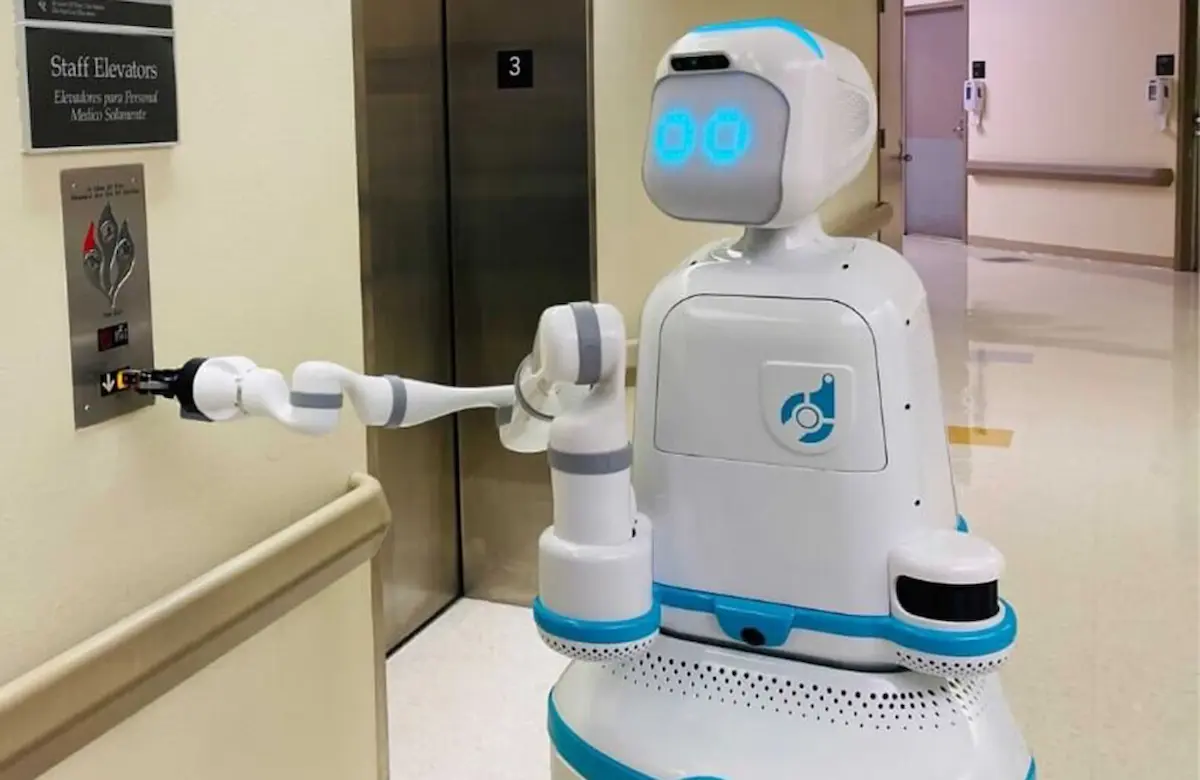
Thao tác Vật lý và Khoảng trống Kết nối Không dây
Để tiết kiệm chi phí đầu tư hạ tầng (CAPEX), Moxi được thiết kế để trực tiếp dùng cánh tay cơ khí bấm nút thang máy hoặc quẹt thẻ từ, thay vì yêu cầu bệnh viện phải đấu nối API cho toàn bộ hệ thống cửa. Đây là một chiến lược thông minh nhưng lại tự tạo ra điểm mù vận hành vật lý.
Hành lang bệnh viện chứa đầy các khu vực cản sóng: phòng X-quang bọc chì, tường bê tông lõi thép hoặc bên trong buồng thang máy. Khi cỗ máy di chuyển qua các điểm này, độ trễ chuyển vùng (Roaming Latency) giữa các bộ định tuyến Wi-Fi tăng vọt. Nếu mất kết nối mạng đột ngột, thiết bị sẽ tự động kích hoạt chế độ an toàn (Safe mode) và đứng im tại chỗ. Việc điều dưỡng viên phải đi tìm và khởi động lại cỗ máy giữa ca trực hoàn toàn đi ngược lại mục tiêu tối ưu năng suất ban đầu.
Rủi ro Bảo mật và Mạng Lưới IoT
Với hệ thống camera đa góc, micrô thu âm và khả năng kết nối mạng nội bộ 24/7, việc tích hợp robot Moxi làm một thiết bị đầu cuối IoT là cực kỳ nhạy cảm. Quá trình kiểm tra hệ thống chỉ ra các lỗ hổng rủi ro đặc thù:
- Tấn công leo thang đặc quyền (Elevation of Privilege): Nền tảng hệ điều hành mã nguồn mở (ROS) của robot nếu không được vá lỗi liên tục có thể bị lợi dụng làm “cửa hậu” (backdoor), giúp tin tặc xâm nhập vào kho Dữ liệu Bệnh án Điện tử.
- Quản trị dữ liệu (Data Governance): Việc sử dụng vi xử lý AI cục bộ giúp giảm tải lượng video đẩy lên đám mây, nhưng vẫn yêu cầu đội ngũ IT phải thiết lập các vách ngăn bảo mật (VLAN) và phân đoạn vi mô (micro-segmentation) mạng nội bộ cực kỳ nghiêm ngặt để tuân thủ luật bảo mật y tế hiện hành.
Tỷ lệ Hỏng hóc và Tương tác Cứu hộ
Mọi cỗ máy cơ khí đều có giới hạn hao mòn. Thời gian trung bình giữa các lần hỏng hóc (MTBF – Mean Time Between Failures) của một hệ thống phức tạp như Moxi trên lý thuyết là khoảng 11.450 giờ hoạt động. Nhưng trên thực tế, độ rung chấn khi băng qua khe hở thang máy, hay va quẹt vật lý thường ngày sẽ kéo giảm chỉ số này rất nhanh, đòi hỏi chu kỳ bảo trì, hiệu chuẩn cụm cảm biến liên tục.
Để duy trì vận hành trơn tru, các cơ sở y tế luôn phải duy trì trung tâm điều hành từ xa (Teleoperation). Khi robot không tự xử lý được các tình huống khó, con người phải trực tiếp can thiệp. Nếu độ trễ mạng lúc này vượt qua ngưỡng 400ms, các thao tác bấm nút hoặc điều hướng cánh tay từ xa sẽ xảy ra sai số.
Kết luận từ ROWOR
Robot Moxi hoàn toàn không phải là thiết bị cắm-và-chạy (plug-and-play). Việc tuyển dụng cỗ máy này đòi hỏi các bệnh viện phải nâng cấp triệt để vùng phủ sóng Wi-Fi, thắt chặt an ninh IoT và quan trọng nhất: chấp nhận sự thật kỹ thuật rằng máy móc luôn cần con người “giải cứu” ở những điểm mù thuật toán. Nắm rõ các rào cản tích hợp này là bước bắt buộc để đảm bảo khoản đầu tư tự động hóa không biến thành gánh nặng bảo trì cho đội ngũ IT.
/ Chuỗi bài Robot Moxi
- Bài 1: Đánh giá Robot Y tế Moxi: Năng suất Thực tế và Bài toán Tối ưu Nhân sự
- Bài 2: Rã máy Robot Y tế Moxi: Cấu trúc Phần cứng và Lõi Điều hướng
- Đang đọc bài 3: Cài đặt Robot Moxi tại Bệnh viện: Điểm mù Vận hành và Rào cản Tích hợp Hệ thống

{kind=link}