
Ở bài kiểm thử trước, chúng ta đã xác định ứng viên Mammotion LUBA 3 AWD sở hữu một Bản mô tả công việc (JD) thực dụng để giải quyết bài toán ROI cho doanh nghiệp. Tuy nhiên, dưới lăng kính của một “Robot HR Agency”, không có nhân sự tự động nào là hoàn hảo tuyệt đối.
Việc đặt thiết bị này lên bàn rã máy LUBA 3 AWD (Teardown) là bước bắt buộc để bóc tách sự thật kỹ thuật nằm sâu bên trong bo mạch. Chúng ta sẽ cùng đo lường ranh giới giữa những thông số phần cứng ấn tượng trên giấy và các điểm mù vận hành trong thực chiến.

Rã máy LUBA 3 AWD giải mã cấu trúc dẫn đường và Nhận thức không gian
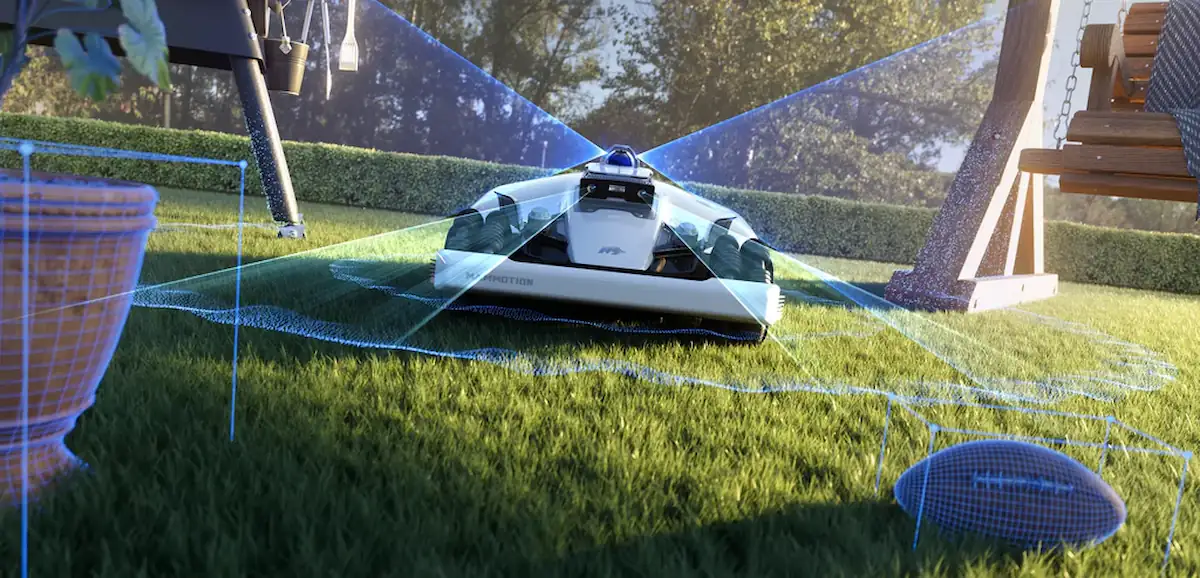
Sự khác biệt lớn nhất khi rã máy LUBA 3 AWD so với các thế hệ tiền nhiệm nằm ở khối óc tự nhận thức không gian. Hãng sản xuất đã áp dụng cấu trúc hệ thống định vị đa luồng (Tri-Fusion Navigation), hợp nhất dữ liệu từ 3 nguồn cảm biến theo thời gian thực để duy trì sai số định vị ở mức ±1 cm.
- Cảm biến quét không gian (360° LiDAR): Đây là loại cảm biến quay cơ học được đặt trên đỉnh máy, cung cấp trường nhìn (FOV) 360° ngang và 59° dọc với tầm phát hiện hiệu quả lên tới 70m. Cấu trúc này tạo ra một đám mây điểm (Point cloud) 3D liên tục, giúp nhân sự tự động này lập bản đồ vật lý và di chuyển chính xác ngay cả khi đi sâu vào các tán cây rậm rạp, nơi tín hiệu vệ tinh bị chặn đứng hoàn toàn.
- Thị giác máy tính (Vision AI): Khối camera kép độ phân giải 1080P cung cấp khả năng thị giác nổi (Stereoscopic vision), chuyên đảm nhận việc nhận diện ranh giới mềm (mép cỏ, vỉa hè) và né tránh vật thể động.
- Bộ vi xử lý AI (Chip 10 TOPS): Để xử lý hàng triệu điểm dữ liệu mỗi giây từ LiDAR và luồng hình ảnh từ Camera, thiết bị được trang bị bộ vi xử lý có năng lực tính toán 10 nghìn tỷ phép tính/giây (10 TOPS), gấp đôi thế hệ trước. Sức mạnh này giúp máy phân loại nhanh hơn 300 loại vật cản và đưa ra quyết định chuyển hướng tính bằng mili-giây.
Bài toán đánh đổi: Sự phụ thuộc vào kết nối mạng viễn thông
Một thay đổi mang tính chiến lược của LUBA 3 AWD là việc chuyển dịch sang công nghệ kết nối vệ tinh qua mạng (NetRTK). Thay vì bắt buộc khách hàng phải lắp đặt một trạm ăng-ten tham chiếu (Base Station) cồng kềnh giữa sân vườn, thiết bị sẽ tải dữ liệu định vị trực tiếp qua mạng Internet thông qua SIM 4G/LTE được tích hợp sẵn.
Dưới góc nhìn “Bài toán Đánh đổi” (Trade-off), thiết kế này mang lại sự gọn gàng cho cảnh quan, nhưng lại tạo ra những rào cản tích hợp rất rõ ràng:
- Độ trễ xử lý (Latency) ở vùng sóng yếu: Ứng viên này phụ thuộc hoàn toàn vào chất lượng phủ sóng di động. Tại các resort đồi núi, khu sinh thái vùng sâu hoặc những góc khuất tín hiệu, dữ liệu định vị sẽ bị trễ. Khi đó, máy dễ rơi vào trạng thái mất phương hướng, đi chệch khỏi ranh giới hoặc đột ngột dừng hoạt động.
- Khoảng cách truyền tải vô tuyến: Nếu không có sóng 4G, thiết bị sẽ ưu tiên dùng Wi-Fi. Tuy nhiên, khả năng xuyên thấu vật cản của mô-đun Wi-Fi tích hợp trên máy được ghi nhận là khá kém khi di chuyển ra xa khỏi điểm phát sóng trung tâm.

Giới hạn cơ khí: Phân tích cụm mâm cắt kép và Rủi ro vận hành
Kiến trúc phần cứng phục vụ cho nhiệm vụ chính của ứng viên là hệ thống mâm cắt kép (Dual Disc) với bề rộng dải cắt 400mm. Mỗi đĩa được trang bị một mô-tơ công suất 165W cùng 6 lưỡi dao xoay tự do (Pivoting blades). Mặc dù sở hữu thông số ấn tượng, môi trường thực chiến lại phơi bày những giới hạn cơ khí không thể tránh khỏi:
- Rào cản bùn đất và độ ẩm: Khi vận hành trên mặt cỏ ướt hoặc đất sét, sự kết hợp giữa cỏ vụn và bùn nhão sẽ nhanh chóng bết dính vào gầm máy và các khe hở trục quay. Nếu lớp bùn này không được vệ sinh và để khô lại, nó sẽ làm kẹt cứng các lưỡi dao, thậm chí gây ra tình trạng quá tải mô-tơ (Motor overload).
- Rủi ro từ dị vật cứng: Hệ dẫn động 4 bánh mạnh mẽ đôi khi lại là một rào cản. Máy có xu hướng mạnh bạo leo qua các rễ cây nổi hoặc cành cây khô. Các mảnh gỗ cứng có nguy cơ bị cuốn thẳng vào khoang cắt, gây ra tiếng ồn lớn và làm mẻ lưỡi dao.
- Điểm mù từ bánh xe đa hướng: Hai bánh trước của máy là bánh xe đa hướng (Omni-wheel). Khi mặt đất quá mềm hoặc trơn trượt, bùn đất bám vào các con lăn sẽ khiến bánh xe mất khả năng xoay tự do và biến thành một khối trượt. Lúc này, nếu máy thực hiện pha quay xe tại chỗ (Zero-turn), nó sẽ cày xới và để lại sẹo trên bề mặt thảm cỏ.
Những rào cản phần mềm và Lỗi linh kiện cần giám sát
Bên cạnh phần cứng cơ khí, người quản lý cần lưu ý thêm các điểm mù về phần mềm quản trị (App flow) và hệ thống cảm biến thường gặp ở thế hệ này:
- Lỗi đồng bộ bản đồ: Việc tải bản đồ và chỉnh sửa phân khu (Zone editing) trên ứng dụng đôi khi thiếu ổn định. Một số trường hợp buộc người dùng phải xóa đi vẽ lại toàn bộ thay vì chỉ điều chỉnh một vài điểm nút ranh giới.
- Độ bền linh kiện ngoại vi: Đã có những báo cáo về lỗi cảm biến nhiệt độ trên bo mạch chủ, khiến thiết bị báo sai trạng thái và từ chối hoạt động. Ngoài ra, cụm LiDAR là bộ phận quay cơ học đặt trên cao, rất nhạy cảm với các va đập vật lý từ cành cây thấp nếu hệ thống né tránh xử lý không kịp.
Nhận định kỹ thuật từ ROWOR
Mammotion LUBA 3 AWD là một cỗ máy sở hữu năng lực xử lý không gian vượt trội nhờ tổ hợp cảm biến Tri-Fusion. Tuy nhiên, để đưa ứng viên này vào đội ngũ, doanh nghiệp đòi hỏi một môi trường làm việc đáp ứng được hạ tầng mạng viễn thông đủ tốt nhằm phát huy tối đa công nghệ NetRTK. Đồng thời, kỹ sư bảo trì cần đưa vào quy trình vận hành một lịch trình vệ sinh cơ khí định kỳ (đặc biệt là gầm máy và cụm camera/LiDAR) để đảm bảo máy không rơi vào các điểm mù vận hành trong điều kiện thời tiết khắc nghiệt.
/ Chuỗi bài robot LUBA 3 AWD
- Bài 1: Đánh giá Robot Cắt cỏ Thương mại: Hiệu suất và Chi phí Vận hành Mammotion LUBA 3 AWD
- Đang đọc bài 2: Rã máy Robot Cắt cỏ Mammotion LUBA 3 AWD: Giới hạn Hệ thống Dẫn đường và Rào cản Tích hợp

{kind=link}