
Lưu ý Y tế: RobotWorks.vn phân tích thiết bị dưới góc độ năng suất và kỹ thuật cơ khí, tuyệt đối không cung cấp tư vấn y khoa hay đánh giá phác đồ điều trị lâm sàng.
Sự xuất hiện của ứng viên robot phẫu thuật Versius đến từ hãng CMR Surgical (Vương quốc Anh) đánh dấu một bước chuyển dịch lớn trong tư duy thiết kế phần cứng y tế. Thay vì trung thành với cấu trúc nguyên khối, cồng kềnh như các thế hệ tiền nhiệm, hệ thống này chọn cách xé lẻ kiến trúc để tối ưu hóa năng suất trong không gian hẹp.
Hôm nay, trên bàn phỏng vấn của ROWOR, chúng ta sẽ bóc tách Bản mô tả công việc (JD) của ứng viên này dựa trên các thông số đo lường vật lý, động học và năng lực xử lý hình ảnh, để xem cỗ máy này thực sự mang lại giá trị gì cho kíp mổ.
1. Tư duy phân mảnh: Giải quyết bài toán không gian phòng mổ của robot phẫu thuật Versius
Điểm khác biệt cốt lõi nhất trong hồ sơ năng lực của Versius là cấu trúc thiết kế mô-đun (Modular design). Hệ thống không cố định tất cả cánh tay vào một bệ đỡ duy nhất. Thay vào đó, Versius phân bổ nguồn lực qua các Trạm tay máy cạnh giường (Bedside Unit – BSU) hoạt động độc lập.

Mỗi trạm BSU được thiết kế với tính thực dụng cao:
- Diện tích chiếm dụng (Footprint): Chỉ vỏn vẹn 38 cm x 38 cm. Con số này cho phép kíp mổ dễ dàng lách qua các khe hở hẹp trong phòng mổ tiêu chuẩn mà không cần đập bỏ tường hay cải tạo hạ tầng cơ sở vật chất.
- Trọng lượng tịnh: Đạt mức 100 kg mỗi trạm. Đây là mức đối trọng vật lý hoàn hảo: Đủ nặng để đảm bảo cấu trúc không bị rung lắc khi tay máy vươn dài (Safe Working Load đạt 25 kg), nhưng vẫn đủ nhẹ để một nhân viên y tế có thể đẩy bộ và khóa phanh cố định bằng tay.
- Trạm điều khiển trung tâm (Surgeon Console): Được thiết kế dạng mở (Open workstation) với chiều cao thay đổi linh hoạt từ 1325 mm đến 2085 mm. Thiết kế này giải quyết bài toán công thái học, cho phép kỹ thuật viên có thể ngồi hoặc đứng, đồng thời không bị cô lập tầm nhìn với đội ngũ phụ mổ xung quanh.
2. Động học cơ khí: Khi máy móc vượt qua giới hạn dây chằng
Giá trị cao nhất của ứng viên Versius nằm ở cụm tay máy thao tác với thiết kế mô phỏng sinh học. Cánh tay này sở hữu 11 khớp chuyển động, trong đó 8 khớp dành cho việc định vị tọa độ và 3 khớp cuối cùng tích hợp công nghệ V-wrist độc quyền nhằm thao tác trực tiếp.
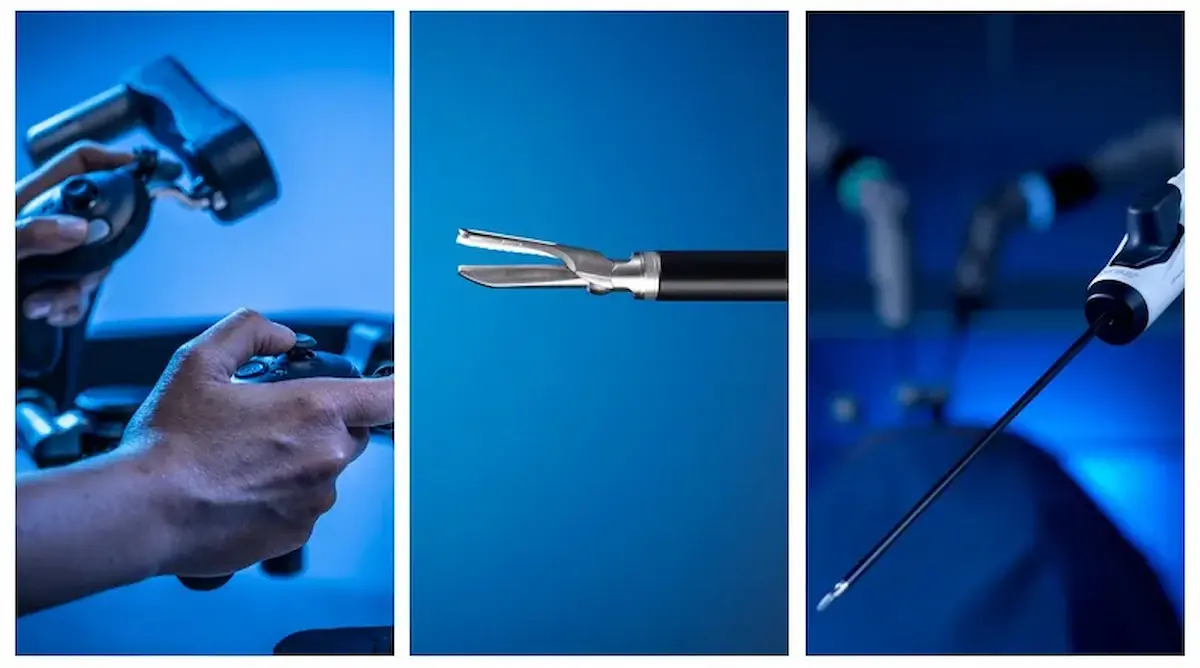
Tuy nhiên, nếu chỉ dừng ở việc “bắt chước” con người, Versius sẽ không có lợi thế cạnh tranh. Cỗ máy này cung cấp 7 Bậc tự do (Degrees of Freedom – DoF) và vượt qua các giới hạn cơ khí tự nhiên của con người:
Trong kỹ thuật nội soi, để xoay kim khâu một góc lớn hơn 150 độ, cổ tay người buộc phải nhả kẹp và kẹp lại từ đầu (re-grasping). Với V-wrist, Versius giải quyết hoàn toàn điểm mù này nhờ khả năng xoay 360 độ liên tục không điểm dừng. Sự phối hợp này, kết hợp cùng cơ chế thu phóng chuyển động (bác sĩ di chuyển 3mm trên tay cầm, robot chỉ nhích 1mm trong cơ thể), tạo ra độ chính xác vượt trội.
HẠNG MỤC ĐO LƯỜNG CỔ TAY BÁC SĨ (SINH HỌC) V-WRIST VERSIUS (CƠ KHÍ)
Giới hạn vật lý Bị chặn bởi cấu trúc xương/dây chằng Bị chặn bởi phần mềm/khớp cơ khí
Biên độ xoay (Roll) Tối đa khoảng 150 độ Xoay 360 độ liên tục (Hai chiều)
Độ chính xác Phụ thuộc vào thể trạng và độ rung tay Áp dụng tỷ lệ thu phóng chuyển động (Ví dụ: 3:1)
Cơ chế truyền động Gân và cơ bắp Hệ thống truyền động cáp vòng kín (Closed-loop wire)
3. Hệ thống Thị giác máy tính: Bóc tách bài toán “Độ trễ”
Năng lực cơ bắp sẽ vô nghĩa nếu hệ thống “bị mù” hoặc phản xạ chậm. Trạm thị giác (V-BSU) của Versius được trang bị ống kính nội soi 3D với độ phân giải lên tới 4K UHD (3840 x 2160 pixels) và tần số quét 60 FPS, đi kèm khả năng hiển thị phổ màu mở rộng (BT.2020) giúp nhận diện rõ hệ thống mạch máu.
Nhưng dưới góc độ của một CTO khảo kiểm phần cứng, chỉ số sống còn không nằm ở độ sắc nét, mà nằm ở Độ trễ tín hiệu (End-to-End Latency):
- Trong vận hành thực chiến, từ lúc camera thu sáng đến khi hình ảnh nảy lên màn hình của bác sĩ, Versius ghi nhận mức độ trễ trung bình chỉ khoảng 67 ms.
- Theo các nghiên cứu kỹ thuật, để sự phối hợp tay – mắt (Hand-eye coordination) trong teleoperation (điều khiển từ xa cục bộ) diễn ra mượt mà và an toàn, độ trễ bắt buộc phải nằm dưới ngưỡng 100 ms.
Bằng việc tối ưu hóa thuật toán nén video (H.265) và truyền dẫn cáp nội bộ trực tiếp, Versius đảm bảo bác sĩ hoàn toàn không cảm nhận được “khoảng lùi thời gian” khi ra lệnh cho dao mổ.
Đánh giá từ ROWOR
Thông qua hồ sơ kỹ thuật, ứng viên CMR Versius chứng minh được năng suất thực tiễn rất cao. Cỗ máy không hướng tới sự đồ sộ, mà tập trung giải quyết bài toán linh hoạt không gian bằng tư duy xé lẻ thiết bị, đồng thời cung cấp năng lực cơ khí vượt trội ở cụm tay gắp.
Tuy nhiên, việc sở hữu 4 cánh tay độc lập thay vì một trụ trung tâm cũng sẽ tạo ra những “điểm mù” nhất định trong khâu thiết lập phần cứng (Docking). Tọa độ của các tay máy nếu không được kỹ thuật viên tính toán kỹ lưỡng có thể dẫn đến hiện tượng va chạm cơ khí (Collisions).
RobotWorks sẽ trực tiếp mổ xẻ rào cản tích hợp này cùng “đường cong học tập” của kíp mổ trong Bài 2: Rã máy Robot Versius: Bóc Tách Điểm Mù Không Gian Và Rào Cản Tích Hợp
/ Chuỗi bài về robot Versius
- Đang đọc bài 1: Đánh giá Robot Phẫu thuật CMR Versius: Bản Mô Tả Công Việc (JD) Kỹ Thuật
- Bài 2: Rã máy Robot Versius: Bóc Tách Điểm Mù Không Gian Và Rào Cản Tích Hợp
- Bài 3: Bài Toán Hoàn Vốn (ROI): Bóc Tách Cấu Trúc Tài Chính Robot Versius

{kind=link}