
Đưa 1X Neo lên bàn kiểm thử phần cứng, chúng ta buộc phải gạt bỏ hoàn toàn lớp vỏ bọc dệt kim thân thiện bên ngoài để đối diện với các giới hạn vật lý của nhiệt động lực học và khoa học vật liệu. Với tư cách là người cấp chứng nhận năng lực cơ khí cho các “nhân sự tự động”, ROWOR tôi không đánh giá ứng viên này qua các video trình diễn mượt mà. Thứ chúng ta cần soi xét là từng dòng điện chạy qua stator và lực căng đứt của từng sợi dây chằng.
Kiến trúc của 1X Neo là một sự đánh đổi: Tước bỏ sức mạnh công nghiệp để đổi lấy sự an toàn sinh học. Dưới đây là biên bản “rã máy” (Teardown) chi tiết nhất về nền tảng này.
Hệ thống truyền động: Sự đào thải của Hộp số và Nghịch lý Mô-men xoắn
Khác biệt hoàn toàn với Atlas hay Optimus, ứng viên 1X Neo cự tuyệt các hộp số giảm tốc độ cứng cao (như Harmonic Drive). Thay vào đó, nền tảng này sử dụng hệ thống Quasi-direct drive (Truyền động bán trực tiếp – QDD) với tỷ số truyền cực thấp, kết hợp động cơ điện có mật độ mô-men xoắn cao đặt tập trung ở lồng ngực và khung chậu.
Nguyên nhân cốt lõi của quyết định này là để triệt tiêu Reflected Inertia (Quán tính phản xạ). Nếu một cánh tay robot dùng hộp số tỷ lệ 1:160 va đập vào con người, quán tính khổng lồ của nó sẽ chuyển hóa thành lực tác động. Với QDD, Neo đạt được mức Backdrivability (Khả năng dẫn động ngược) lên tới 95%. Nghĩa là, hệ thống truyền động đủ “mềm” để tự động bị ép lùi lại khi va chạm, biến cỗ máy thành một thực thể tuân thủ cơ học thụ động.
Tuy nhiên, sự thật kỹ thuật luôn có cái giá của nó. Việc vắng bóng hộp số tĩnh đồng nghĩa với việc động cơ điện phải tự mình chống lại toàn bộ lực hấp dẫn để duy trì Payload (Tải trọng) 25 kg. Để giữ cánh tay ở trạng thái nâng tĩnh, bộ điều khiển phải liên tục bơm dòng điện một chiều cực lớn vào cuộn dây stator, kích hoạt định luật Joule sinh ra nhiệt lượng khổng lồ.
Truyền động Cáp và Bài toán Rão lạnh Vật liệu
Để truyền lực từ lồng ngực ra các đầu chi, Neo sử dụng kiến trúc Tendon-driven transmission (Truyền tải dây chằng). Các kỹ sư đã sử dụng UHMWPE (Sợi Polymer Trọng lượng Phân tử Siêu cao) như Dyneema, vật liệu nhẹ hơn thép nhưng có độ bền kéo đứt vượt trội.
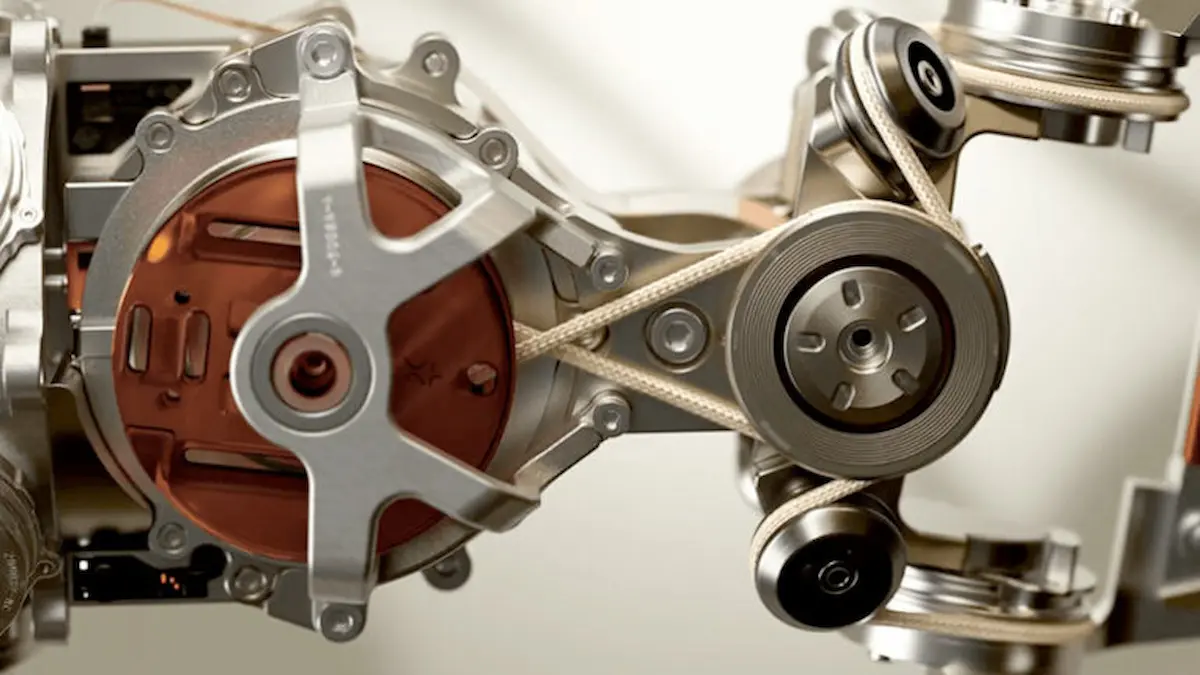
Cơ học này triệt tiêu khối lượng ở các khớp xa, cho phép bàn tay vung với gia tốc lên tới 8.0 m/s mà không tự văng khỏi khớp. Sự đàn hồi của cáp tạo ra Series Elastic Actuation (Dẫn động đàn hồi nối tiếp), đóng vai trò như bộ giảm xóc tự nhiên.
Dù vậy, điểm yếu chí mạng của polymer là Cold Creep (Hiện tượng rão lạnh). Dưới tải trọng liên tục, sợi cáp sẽ bị giãn ra vi mô. Điều này dẫn đến Tension Drift (Trôi lực căng), làm sai lệch tọa độ không gian của cánh tay. Để cỗ máy không bị “mù” vị trí, hệ thống AI phải liên tục đối chiếu dữ liệu bộ mã hóa ở tần số 100Hz và ngầm siết lại dây cáp bù trừ sai số chỉ trong vài mili-giây.
Hao hụt kWh, Sạc cực đoan và Độ lệch Nhiệt
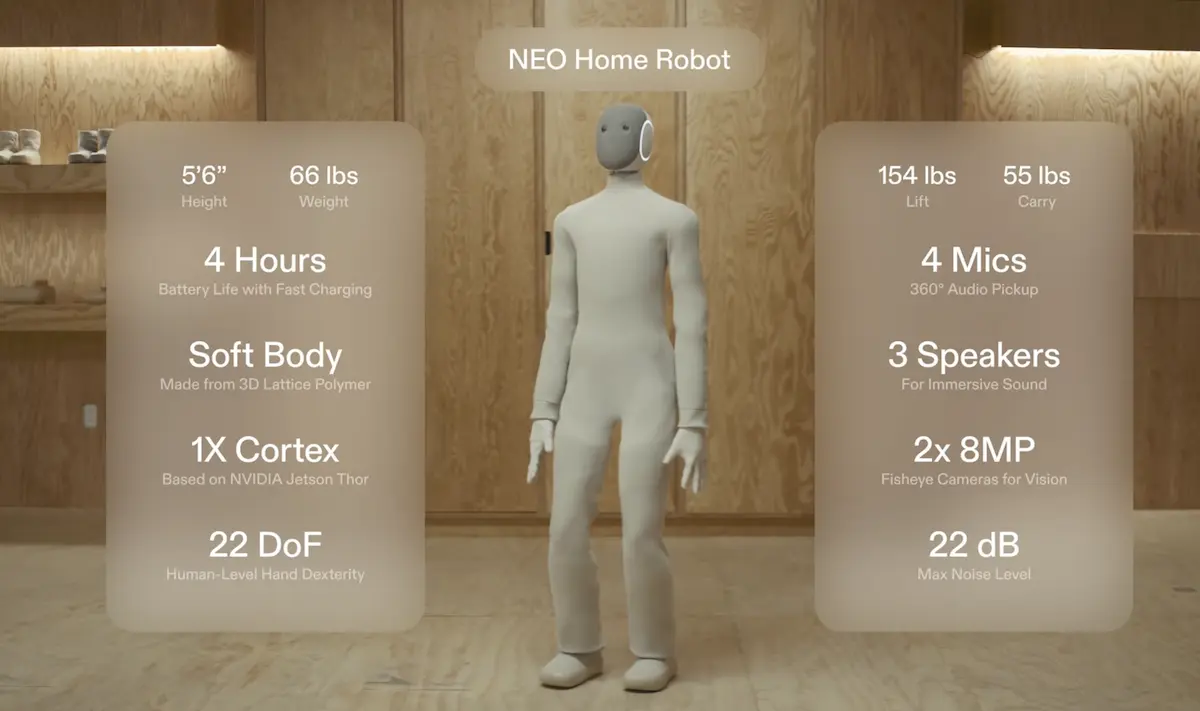
Khối pin nội bộ của 1X Neo chỉ đạt 842 Wh, nhưng nhờ kiến trúc siêu nhẹ và việc tận dụng Pogo Stick Effect (Hiệu ứng gậy pogo – dùng độ nảy đàn hồi của cáp để phụ trợ động năng), cỗ máy có thể duy trì ca làm việc lên tới 4 giờ. Mức tiêu thụ điện trung bình chỉ rơi vào khoảng 210.5 Watts.
Tuy nhiên, thông số “Sạc 6 phút được 1 giờ hoạt động” che giấu một rủi ro nhiệt động lực học khủng khiếp. Để nhồi 210 Wh vào pack pin trong 6 phút, trạm sạc phải bơm dòng điện cực đại lên tới 2.1 kW. Quá trình ép xung này đặt hệ thống trước bờ vực của Thermal Runaway (Thoát nhiệt).
Bên cạnh đó, Thermal Drift (Độ lệch nhiệt) là một kẻ thù giấu mặt. Lớp vỏ bọc dệt kim an toàn sinh học vô tình biến cơ thể 1X Neo thành một buồng cách nhiệt. Khi động cơ QDD và cụm chip Nvidia sinh nhiệt, khung kim loại giãn nở vi mô làm sai lệch dữ liệu cảm biến góc quay. Để giải quyết, Neo buộc phải dùng hệ thống đo lường vi sai từ tính để bù trừ sai số, đồng thời tích hợp mạng lưới Active Blower Cooling (Tản nhiệt chủ động bằng quạt ly tâm) luồn lách qua các khe mạch chật hẹp, xả khí nóng qua các vi lỗ trên áo mà vẫn giữ được độ ồn vận hành tĩnh lặng ở mức 22 dB.
Tay gắp 22 Bậc tự do và Chỉ số Chấn thương (HIC)
Hệ thống EOAT (Tay gắp) của 1X Neo là một tổ hợp cơ khí thu nhỏ triệt để. Tuyệt đối không có động cơ kim loại nào nằm ở lòng bàn tay. Toàn bộ động cơ được dời lên cẳng tay, kéo các lóng ngón tay thông qua hệ thống cáp và lò xo đối trọng. Kiến trúc dưới dẫn động này xóa sổ các điểm kẹp cơ khí (pinch points) – nếu lực cản quá lớn, ngón tay sẽ tự nhượng bộ thay vì cố bóp nát vật thể.
Sự khéo léo của “ứng viên” này được định hình bởi lớp màng Piezoresistive tactile sensors (Cảm biến xúc giác áp trở) phủ ở đầu ngón tay. Khả năng phát hiện trượt vi mô với thời gian phản hồi dưới 30ms cho phép robot tự động siết lực căng trước khi vật thể rơi xuống.
Nhìn rộng ra toàn bộ thân vỏ, cấu trúc 3D Lattice Polymer (Lưới polymer 3D) đóng vai trò như vùng hấp thụ xung lực. Nhờ thiết kế này, chỉ số HIC (Tiêu chuẩn chấn thương sọ não) của 1X Neo được ép xuống dưới ngưỡng 250. Về mặt vật lý, ngay cả khi cỗ máy này va chạm mạnh nhất, nó cũng không thể gây ra sát thương vật lý nghiêm trọng.
Kết luận của ROWOR: Dưới góc nhìn của một CTO rã máy phần cứng, 1X Neo không phải là một cỗ máy công nghiệp bền bỉ. Nó là một thiết bị sinh học – cơ khí phức tạp, chấp nhận đánh đổi độ cứng vững và gia tăng rủi ro hao mòn cáp truyền động để tối ưu hóa sự an toàn tuyệt đối. Mặc dù chi phí CAPEX (Đầu tư ban đầu) có thể rẻ nhờ loại bỏ hộp số đắt tiền, nhưng tuổi thọ của dây chằng polymer và áp lực tản nhiệt chắc chắn sẽ đẩy OPEX (Chi phí bảo trì vận hành) lên cao nếu doanh nghiệp ép cỗ máy này hoạt động vượt quá tải trọng 25kg trong môi trường kho bãi liên tục.
/ Chuỗi bài về robot 1X Neo
- Bài 1: Đánh giá Hiệu năng Robot Logistics: 1X Neo tại kho bãi thương mại điện tử
- Đang đọc bài 2: Bóc tách Cấu trúc Phần cứng và Động cơ Robot Hình người: 1X Neo
- Bài 3: Đánh giá Lõi AI và Hệ thống Điều hướng Robot Hình người: 1X Neo
- Bài 4: Bài toán Chi phí và Chiến lược Tích hợp Robot Hình người: 1X Neo

{kind=link}