
“Lưu ý: RobotWorks.vn phân tích thiết bị này dưới lăng kính kỹ thuật cơ khí, quản trị năng suất và bài toán hoàn vốn (ROI). Bài viết hoàn toàn không mang tính chất đánh giá lâm sàng và không phải là nội dung tư vấn y khoa.”
Một “nhân sự robot” có thể sở hữu hệ thống phần mềm quản trị xuất sắc, nhưng năng suất cuối cùng luôn bị khóa chặt bởi các giới hạn cơ khí. Trong môi trường y tế, nơi sai số vật lý không được phép tồn tại, việc rã máy (teardown) để bóc tách năng lực phần cứng BD Rowa Vmax là bước thẩm định bắt buộc.
Dưới lăng kính kỹ thuật thực dụng, chúng ta sẽ soi chiếu khả năng thực thi và những “điểm mù” vật lý của hệ thống tay gắp và cụm thị giác máy tính trên ứng viên này.
1. Tay gắp đa nhiệm: Sức mạnh và Giới hạn Tải trọng (Payload) phần cứng BD Rowa Vmax
Bộ phận chấp hành cuối (EOAT – End-of-Arm Tooling) là vũ khí cốt lõi của Vmax. Thay vì sử dụng cốc hút chân không (vacuum cups), vốn có rào cản lớn khi gặp bề mặt vỏ hộp không phẳng, Vmax sử dụng công nghệ ngàm kẹp chữ V (V-shaped pincers) kết hợp dải băng dính (grip tape) chuyên dụng.
Khả năng đa nhiệm (Multi-picking): Động cơ servo trục Z cho phép đầu gắp thụ động định tâm vật thể cực kỳ chính xác. Ở các phiên bản High-Performer (Vmax 210/320), ngàm gắp có khả năng kẹp và rút tối đa 14 hộp thuốc cùng lúc trên một chu kỳ di chuyển.

Giới hạn cơ khí & Tải trọng (Payload): Hệ thống thiết lập một dải thông số rất khắt khe dựa trên đặc tính vật lý của bao bì:
- Hộp chữ nhật phẳng: Tải trọng an toàn dao động từ 5g đến 1.000g. Nếu nhẹ hơn 5g, vỏ hộp rỗng có nguy cơ bị bẹp dưới áp lực kẹp hoặc bay mất do luồng khí khi robot di chuyển với tốc độ 1,8 m/s. Nếu nặng hơn 1.000g, dây đai truyền động của trục Z sẽ đối mặt với rủi ro giãn tĩnh hoặc trượt răng, làm sai lệch tọa độ.
- Vật thể trụ tròn (Chai, lọ): Tải trọng trần bị ép xuống mức 800g. Nguyên nhân đến từ diện tích tiếp xúc giữa ngàm chữ V và bề mặt cong nhỏ hơn rất nhiều so với hộp phẳng, dẫn đến áp suất kẹp cục bộ cao và dễ rơi rớt khi chịu lực quán tính ly tâm.
Bài toán đánh đổi: Tính năng gắp 14 hộp mang lại thông lượng khổng lồ, nhưng tạo ra momen xoắn cực lớn tại chân đầu gắp. Nếu hệ thống kích hoạt dừng khẩn cấp (Emergency Stop) khi đang chạy ở tốc độ tối đa, lực quán tính sẽ làm sai lệch cấu trúc cơ khí, buộc kỹ sư phải hiệu chuẩn (calibration) lại toàn bộ trước khi cho máy chạy tiếp.
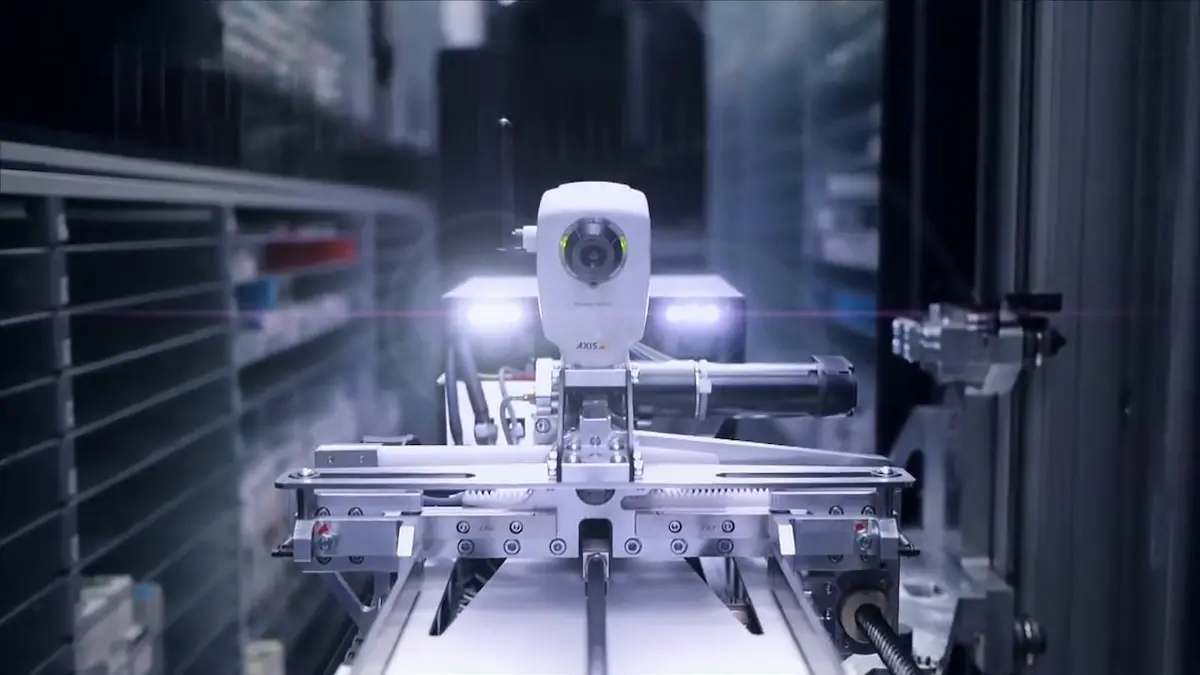
2. Thị giác máy tính: Điểm mù và Nút thắt Xử lý OCR
Hệ thống “mắt thần” của Vmax là sự kết hợp giữa cụm quang học (camera CMOS, đèn LED) và cảm biến đo lường vật lý. Tuy nhiên, năng lực nhận diện của máy móc luôn có giới hạn khi đối mặt với dữ liệu phi tiêu chuẩn.
Nút thắt thông lượng (Throughput Bottleneck): Khi hệ thống nạp tự động (EasyLoad/iProLog) chỉ sử dụng camera để đọc mã vạch 2D truyền thống, tốc độ duy trì ở mức 150 – 200 hộp/giờ. Nhưng khi kích hoạt tính năng nhận dạng ký tự quang học (OCR) để đọc ngày hết hạn (Date of Expiry) hoặc số lô in mờ trên vỏ hộp, năng lực xử lý đồ họa làm độ trễ hệ thống tăng lên, ép thông lượng rơi xuống chỉ còn 120 hộp/giờ.
Điểm mù vận hành (Operational Blind Spots):
- Hiện tượng biến dạng phối cảnh: OCR gần như “mù” trước các chai lọ hình trụ tròn do bề mặt cong làm ký tự bị méo. Máy chỉ có thể quét mã vạch trên chai tròn, còn dữ liệu hạn sử dụng phải được đồng bộ từ cơ sở dữ liệu WMS/HIS hoặc nhập tay.
- Lóa sáng (Glare) và biến dạng vật lý: Các vỏ thuốc bọc màng co (foil) phản quang hoặc hộp móp méo sẽ làm rối loạn thuật toán xác định biên (edge detection).
- Để giải quyết, Vmax dùng rào cản đo lường vật lý (light curtains/laser sensors). Nếu quét laser thấy hộp thuốc ngoài đời thực có kích thước sai lệch quá 5% so với dữ liệu gốc (Master Data), cánh tay gắp sẽ từ chối chạm vào và lập tức đẩy hộp đó ra khay báo lỗi (disposal box).
3. Bài toán Hao mòn & Khấu hao Bảo trì
Duy trì độ tin cậy 99,9% trong môi trường y khoa đồng nghĩa với việc doanh nghiệp phải chấp nhận một quy trình bảo trì (Housekeeping) nghiêm ngặt để đổi lấy sự ổn định.
- Bảo trì tĩnh: Hệ thống ray dẫn hướng dọc (track system) và thang nâng trục Y phải chịu tải trọng tĩnh lớn (sàn nhà yêu cầu khả năng chịu tải 600 kg/m²). Trục vít (spindle) của đầu gắp yêu cầu làm sạch định kỳ 4 tháng/lần bằng mỡ Lithium chuyên dụng để chống mất bước (step loss) cho động cơ.
- Bảo trì động: Cụm cảm biến và mắt đọc camera bắt buộc vệ sinh hàng tuần. Băng dính (grip tape) trên ngàm chữ V phải kiểm tra hàng tháng, vì độ nhám suy giảm sẽ trực tiếp làm rơi các hộp thuốc nặng khi máy phanh gấp.
- Điểm mù cáp xích (Drag chains): Với chu kỳ gắp trung bình 8-12 giây và chiều dài khung máy có thể lên tới 15,17 mét, hệ thống cáp tín hiệu chạy dọc thân máy phải uốn cong hàng triệu lần mỗi năm. Sự mỏi vật liệu (material fatigue) ở cụm cáp này là nguyên nhân tiềm ẩn lớn nhất gây ra lỗi mất tín hiệu chập chờn.
Góc nhìn của ROWOR: Phần cứng BD Rowa Vmax được chế tác tinh xảo nhưng cực kỳ thực dụng: máy móc sẽ từ chối rủi ro (đẩy hàng lỗi ra ngoài) thay vì cố gắng xử lý các bao bì dị biệt để bảo vệ kết cấu cơ khí lõi. Ngàm kẹp chữ V là một thiết kế cơ khí xuất sắc, nhưng giới hạn tải trọng 1.000g và điểm mù thị giác OCR trước chai lọ hình trụ là rào cản vật lý không thể chối cãi.
Đừng đòi hỏi một ‘nhân sự robot’ phải giải quyết mọi sự bừa bộn của con người. Sự thật kỹ thuật ở đây là: Thay vì cố ép robot phải thông minh hơn để đọc những bao bì méo mó, doanh nghiệp phải kỷ luật hóa chuỗi cung ứng đầu vào. Vmax sẽ từ chối xử lý các bao bì không đạt chuẩn để bảo vệ độ chính xác và tuổi thọ hệ thống. Doanh nghiệp cần phối hợp với nhà cung cấp để chuẩn hóa bao bì đầu vào.
/ Chuỗi bài robot BD Rowa Vmax
- Bài 1: Đánh giá Thủ kho Tự động BD Rowa Vmax: Hiệu năng thực chiến tại Nhà thuốc
- Đang đọc bài 2: Cấu trúc Phần cứng BD Rowa Vmax: Đánh giá Tay gắp đa nhiệm và Cảm biến
- Bài 3: Chi phí Tích hợp BD Rowa Vmax: Bài toán Đánh đổi và Tỷ suất Hoàn vốn

{kind=link}