
Dưới lăng kính của một Robot HR Agency (Đại lý nhân sự Robot), việc tuyển dụng một cỗ máy vào kho hàng cũng giống như phỏng vấn một nhân viên cấp cao: Chúng ta cần biết chính xác “ứng viên” này có thể làm gì và đâu là giới hạn của nó.
Robot Locus Origin – mẫu AMR (Autonomous Mobile Robot – Robot tự hành) tiêu biểu của Locus Robotics, thường được ca ngợi là cuộc cách mạng kho bãi. Nhưng đứng ở góc độ kỹ thuật thực dụng, đây là một bài toán đánh đổi giữa sự linh hoạt và khả năng tự chủ hoàn toàn.
1. Bản mô tả công việc (JD): Mẫu robot triệt tiêu thời gian nghỉ
Trong quản trị kho bãi, Travel Time (Thời gian di chuyển không sinh công) của công nhân chiếm từ 50% đến 65% tổng chi phí vận hành. “Ứng viên” Locus Origin được sinh ra để giảm thiếu con số này.

Khác với các dòng robot “Follow-me” (chạy theo sau người) vốn làm chậm tiến độ vì phải đợi tốc độ đi bộ của con người, Locus Origin vận hành theo mô hình phối hợp Zone-based (Phân vùng tĩnh).
- Cơ chế vận hành: Robot tự điều hướng đến đúng tọa độ kệ hàng. Công nhân chỉ việc đứng yên trong khu vực của mình, đợi máy đến, nhìn màn hình chỉ dẫn và nhặt hàng bỏ vào khay.
- Nhiệm vụ phù hợp (JD): Discrete-item picking (Nhặt hàng lẻ/chi tiết) cho các đơn hàng thương mại điện tử (quần áo, linh kiện, mỹ phẩm).
- Hệ thần kinh điều phối: Máy chạy dưới sự chỉ đạo của WES (Warehouse Execution System – Hệ thống thực thi kho bãi), liên tục tính toán lộ trình tối ưu để không robot nào phải “xếp hàng” đợi nhau.
2. Đo lường hiệu năng: Những con số không biết nói dối
Dữ liệu từ các trung tâm phân phối lớn (Fulfillment Center) cho thấy sự bùng nổ về Throughput (Thông lượng xử lý) ngay sau khi “nhân sự” này nhận việc:
Chú thích: UPH (Units Per Hour) là số đơn vị hàng hóa xử lý được mỗi giờ.
CHỈ SỐ KIỂM THỬ TRƯỚC KHI DÙNG ROBOT SAU KHI DÙNG LOCUS ORIGIN BIÊN ĐỘ CẢI THIỆN
Thông lượng (Staples Canada) 42 UPH 82 UPH Tăng 95%
Thông lượng (GEODIS) 65 UPH 98+ UPH Tăng >50%
Chu kỳ đơn hàng (Cycle Time) 100% 30% Giảm 70%
Độ chính xác đơn hàng ~99.2% 99.95% Cận mức hoàn hảo
Tốc độ di chuyển thực tế của máy duy trì ở mức 1.1 m/s đến 1.8 m/s, đảm bảo an toàn tuyệt đối khi làm việc cạnh con người nhưng vẫn nhanh hơn đáng kể so với việc đẩy xe thủ công.
3. Rào cản cơ khí: Giới hạn 36kg và “Điểm mù” tải trọng
Mọi cỗ máy đều có giới hạn. Với Locus Origin, ranh giới đó là Payload (Tải trọng hữu ích) tối đa 36 kg (80 lbs).
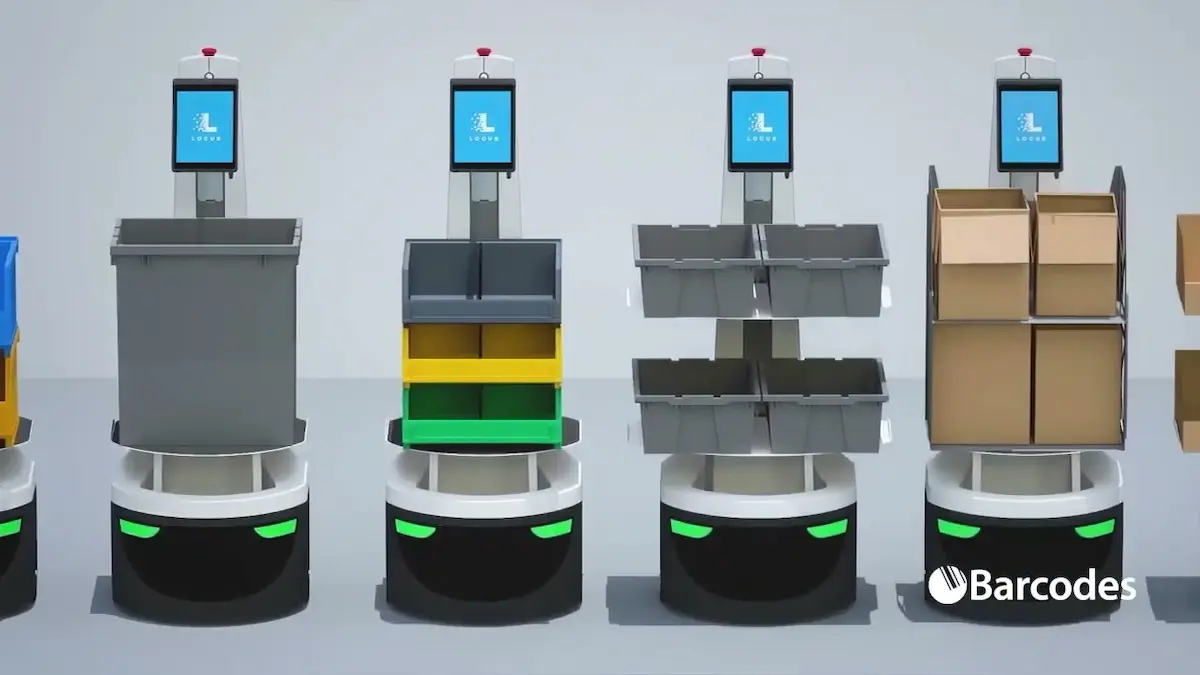
Thiết kế hình trụ tròn (đường kính khoảng 56cm) là một nỗ lực giải quyết “Bài toán di chuyển Sofa” – giúp máy xoay tại chỗ (Zero-degree turn) trong lối đi hẹp mà không cần khoảng hở. Tuy nhiên, tải trọng nhẹ khiến máy bị loại trừ hoàn toàn khỏi các tác vụ:
- Case picking: Bốc dỡ nguyên kiện hàng nặng (linh kiện kim loại, chất lỏng).
- Palletizing: Di chuyển và xếp dỡ Pallet.
Nếu nhồi nhét quá tải, Center of Gravity (Trọng tâm) của máy sẽ bị lệch, gây rủi ro lật đổ hoặc làm hỏng hệ thống truyền động động cơ. Đối với các đơn hàng nặng, doanh nghiệp buộc phải “tuyển” những đàn anh như Locus Vector (Payload 272kg).
4. Gót chân Achilles: Sự phụ thuộc vào tốc độ sinh học
Điểm nghẽn (Bottleneck) lớn nhất của “nhân sự” này chính là việc hoàn toàn không có EOAT (End-of-Arm Tooling – Tay gắp robot).
Locus Origin thực chất là một “chiếc xe đẩy thông minh” nhưng không có tay. Nó có thể chạy đến kệ hàng nhanh nhất thế giới, nhưng lại phải dừng lại và “cầu cứu” đôi tay của con người để lấy hàng từ kệ bỏ vào khay.
Sự thật kỹ thuật này dẫn đến các rủi ro:
- Dwell Time (Thời gian chờ rỗi): Nếu công nhân đang bận hoặc mệt mỏi, robot buộc phải đứng yên chờ đợi.
- Giới hạn tốc độ sinh học: Năng suất tối đa của hệ thống vẫn bị đóng đinh vào tốc độ bốc xếp của con người. Nếu công nhân giảm phong độ vào cuối ca làm việc, thông lượng của toàn bộ dàn robot cũng sẽ sụt giảm theo.
Tổng kết của ROWOR
Locus Origin là một khoản đầu tư xuất sắc cho bài toán ROI (Tỷ suất hoàn vốn) ngắn hạn nhờ khả năng triệt tiêu thời gian di chuyển rỗng. Tuy nhiên, dưới lăng kính của một CTO khó tính, đây vẫn là một giải pháp “tự động hóa bán phần”.
Năng lực của nó khởi đầu bằng một thuật toán AI xuất sắc nhưng lại kết thúc ở giới hạn thể lực của con người. Để phát huy tối đa năng suất, doanh nghiệp cần dùng đúng người, giao đúng việc: Hãy để Locus Origin lo phần di chuyển, và tập trung tối ưu hóa thao tác tay của công nhân tại các “vùng nhặt hàng” cố định.
/ Chuỗi bài Robot Locus Origin
- Đang đọc bài 1: Đánh giá Robot Kho bãi: Hiệu năng thực tế và Điểm nghẽn của Locus Origin
- Bài 2: Phân tích Phần cứng và Lõi AI: Cấu trúc hệ thống của Locus Origin
- Bài 3: Chi phí đầu tư và Tỷ suất hoàn vốn (ROI) của Robot Locus Origin

{kind=link}