
Nếu phần cứng là cơ bắp, thì hệ điều hành và lõi AI chính là hệ thần kinh quyết định sự sống còn của một robot hình người trên sàn nhà máy. Tuy nhiên, trong môi trường sản xuất xe điện (EV) đòi hỏi tốc độ xử lý tính bằng mili giây, “ứng viên” UBTECH Walker S đang phải đối mặt với một rào cản vô hình: Khoảng trống giữa nhận thức và hành động.
Trên bàn “rã máy” hôm nay, chúng ta sẽ bóc tách cấu trúc não bộ BrainNet 2.0, đo lường độ trễ thực tế và soi chiếu các rào cản API (Giao diện lập trình ứng dụng) khi “nhân sự” này cố gắng kết nối với hệ thống quản lý nhà máy.
1. Cấu trúc Não kép: BrainNet 2.0
Để không làm quá tải phần cứng tại chỗ (Edge computing), UBTECH thiết kế cho Walker S một hệ thống “AI hai chu kỳ” (AI dual-cycle), chia tách nhiệm vụ tư duy và phản xạ:
- Siêu não bộ (Super Brain – Nút suy luận): Chạy trên nền tảng các mô hình ngôn ngữ lớn (LLM) như Baidu ERNIE hoặc DeepSeek-R1. Đây là nơi tiếp nhận lệnh bằng ngôn ngữ tự nhiên từ giám sát viên, phân tích hiện trường và lập kế hoạch công việc.
- Tiểu não thông minh (Intelligent Cerebellum – Nút kỹ năng): Được cài đặt trực tiếp trên phần cứng robot (sử dụng chip NVIDIA Jetson Thor hoặc Orin). Nhiệm vụ của nó là biến các kế hoạch trừu tượng từ Siêu não bộ thành các lệnh mô-men xoắn (Torque) cụ thể cho 52 khớp nối để thực hiện hành động.
Sợi dây liên kết hai bộ phận này là công nghệ Co-Agent. Nó đảm bảo rằng nếu mạng 5G bị mất kết nối với Siêu não bộ, robot sẽ không bị “đột quỵ” mà sẽ kích hoạt chế độ an toàn cục bộ để giữ thăng bằng và dừng lại tại chỗ.
2. Thước đo Độ trễ: 1 giây của AI và 250 mili giây của Con người
Điểm yếu chí mạng khiến Walker S chỉ đạt tối đa 50% năng suất so với công nhân là Độ trễ xử lý (Processing Latency).
Theo dữ liệu kỹ thuật, quá trình suy luận của LLM để đưa ra phản hồi đầu tiên mất khoảng 800 – 1000 mili giây (1 giây). Trong thế giới sản xuất công nghiệp, 1 giây là một khoảng thời gian dài vô tận. Để so sánh, phản xạ mắt – tay của con người chỉ mất khoảng 200 – 250 mili giây.
Chính vì “tư duy chậm”, Walker S buộc phải vận hành ở chế độ cực kỳ thận trọng và tốc độ thấp. Bất kỳ nỗ lực đẩy nhanh tốc độ nào mà không rút ngắn được độ trễ xử lý này đều sẽ dẫn đến sai lệch tọa độ hoặc va chạm nghiêm trọng. Do đó, hiện tại, lõi AI chỉ được tin dùng cho các tác vụ lập kế hoạch bất đối xứng, còn các phản xạ né tránh va chạm phải dựa hoàn toàn vào hệ thống điều khiển cục bộ (Control Loop) với tần số 1 kHz (1000 lần tính toán mỗi giây).
3. Giải mã “Điểm mù” và Hệ thống thị giác 4 mắt
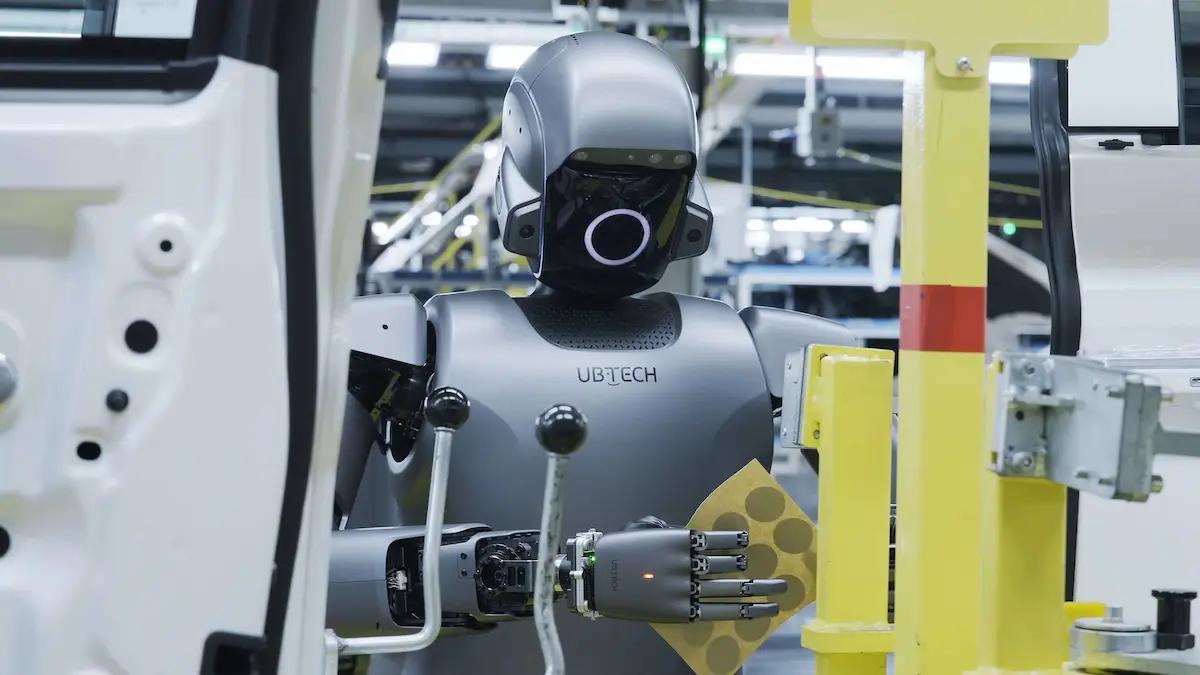
Trong môi trường thí nghiệm, robot thường dùng camera gắn trên đầu (Head-mounted RGB-D). Tuy nhiên, khi đưa vào nhà máy NIO, UBTECH phát hiện ra một nghịch lý: Sự tắc nghẽn thị giác hai mắt phía trước (Front Binocular Occlusion).
Khi robot dùng hai tay để luồn dây cáp hoặc gắn logo ngay trước ngực, chính cánh tay và vật dụng sẽ che khuất hoàn toàn tầm nhìn của camera trên đầu. Đây là “điểm mù” khiến robot bị mất định vị không gian ngay tại thời điểm quan trọng nhất.
Giải pháp của Walker S2 là từ bỏ camera hồng ngoại đơn lẻ để chuyển sang cấu trúc Quadocular Semantic V-SLAM (Hệ thống định vị thị giác 4 mắt). Việc phân bổ 4 camera quanh thân máy cho phép robot duy trì luồng dữ liệu hình ảnh liên tục: nếu camera trên đầu bị tay che khuất, các camera dưới thân sẽ tiếp quản việc định vị, đảm bảo sai số vị trí không vượt quá ±2 cm trên toàn sàn nhà máy.
4. Rào cản “Nhập hộ khẩu”: Khi ROS 2 gặp ERP/WMS
Thử thách lớn nhất của các Manager khi triển khai Walker S không phải là robot biết đi hay không, mà là làm sao để nó “nói chuyện” được với hệ thống cũ.
Hệ điều hành ROSA 2.0 của robot chạy trên giao thức DDS (Data Distribution Service), một kiểu truyền tin liên tục, tốc độ cao (1000 Hz). Ngược lại, các phần mềm quản lý kho (WMS) hay hoạch định nguồn lực doanh nghiệp (ERP) truyền thống lại chạy trên các giao thức giao dịch (Transactional) như REST API (JSON) hoặc MQTT.
Hai rào cản tích hợp hệ thống chính bao gồm:
- Quá tải Telemetry: Robot tạo ra một lượng dữ liệu khổng lồ (điện áp pin, tọa độ SLAM, nhiệt độ động cơ) mỗi giây. Nếu đẩy thẳng lượng dữ liệu này vào API của hệ thống WMS thông thường, nó sẽ gây nghẽn mạng và treo máy chủ (Rate limiting) ngay lập tức.
- Đồng bộ hóa MES: Tại nhà máy NIO F2, Walker S phải tích hợp trực tiếp với Hệ thống điều hành sản xuất (MES). Băng chuyền sản xuất sẽ không chuyển xe sang trạm tiếp theo nếu chưa nhận được một Webhook (thông báo tự động) từ robot xác nhận việc kiểm tra chất lượng đã hoàn tất 100%.
Kết luận của ROWOR
UBTECH Walker S là một ứng viên “học giỏi nhưng phản xạ chậm”. Mặc dù đã giải quyết được các điểm mù thị giác bằng hệ thống 4 mắt và có khả năng kết nối mạng 5G/Wi-Fi 6 mạnh mẽ, nhưng độ trễ tư duy 1 giây của LLM vẫn là rào cản khiến nó chưa thể đạt được tỷ lệ thay thế công nhân 1:1. Đối với một CTO, việc tuyển dụng Walker S lúc này đồng nghĩa với việc chấp nhận một nhân sự chính xác tuyệt đối nhưng cần một hạ tầng phần mềm trung gian (Middleware) phức tạp để kết nối vào hệ sinh thái nhà máy.
/ Chuỗi bài viết robot Walker S
- Bài 1: Đánh giá Robot Hình người: Hiệu năng UBTECH Walker S tại nhà máy xe điện
- Bài 2: Cấu trúc Phần cứng UBTECH Walker S: Đánh giá Động cơ và Cảm biến
- Đang đọc bài 3: Giải phẫu Trí tuệ và Khả năng Điều hướng: Phân tích Năng lực Lõi AI và Tích hợp UBTECH Walker S
- Bài 4: Kiểm thử hiệu năng UBTECH Walker S: Đo lường tải trọng và thời gian chu kỳ
- Bài 5: Bài toán tài chính UBTECH Walker S: Phân tích chi phí đầu tư và vận hành

{kind=link}