
Trong quy trình tuyển dụng “nhân sự robot”, các thông số trên catalogue thường bỏ qua những giới hạn vật lý cốt lõi. Với trọng lượng bản thân 62 kg và gánh thêm 40 kg tải trọng, Bear Robotics Servi Plus tạo ra một khối động năng lên tới 102 kg khi di chuyển ở vận tốc tối đa 1.2 m/s.
Để đánh giá chính xác năng lực thực chiến của phần cứng Servi Plus trong môi trường F&B, chúng ta cần thực hiện một bài rã máy (teardown) trên giấy. Trọng tâm của phân tích là bóc tách hệ thống giảm chấn, độ bền vật liệu và đo lường sự thật kỹ thuật về độ trễ của lõi nhận thức.
1. Cơ khí khung gầm và Hệ thống treo chủ động phần cứng Servi Plus
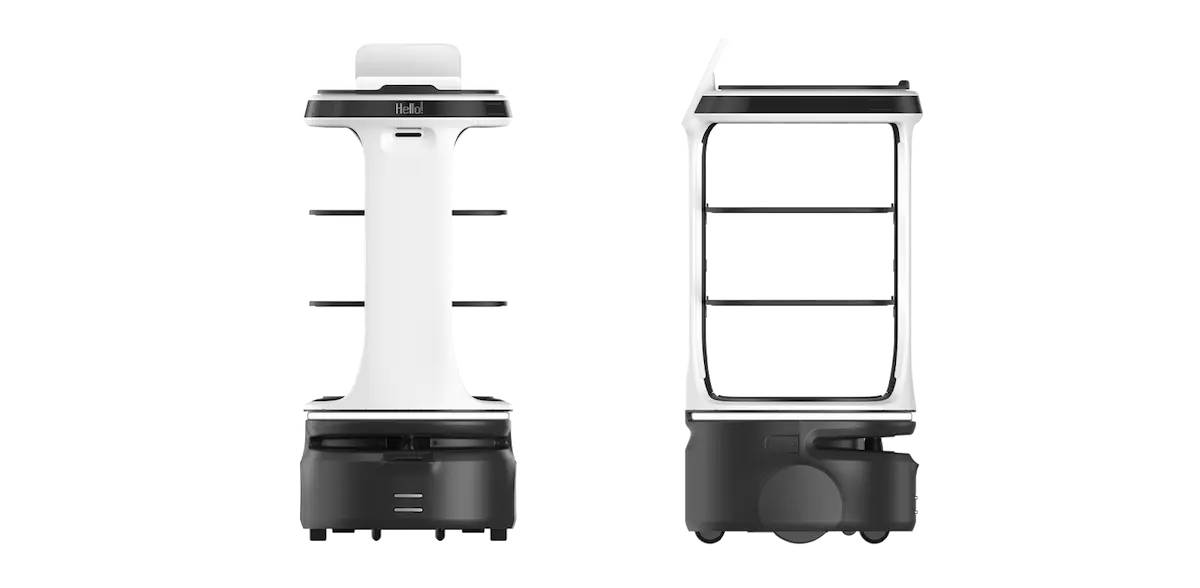
Thách thức lớn nhất trong Bản mô tả công việc (JD) của ngành lưu trú là vận chuyển chất lỏng (súp, đồ uống) ở tốc độ cao mà không gây sóng sánh. Để giải quyết bài toán lực ly tâm, cỗ máy này được cấu trúc lại hoàn toàn phần đế dẫn động (Base).
Cơ chế liên kết Rocker-Bogie và Kiểm soát trọng tâm Hệ thống cơ khí của máy không sử dụng lò xo nén đơn thuần mà ứng dụng Active Suspension (Hệ thống treo chủ động) mô phỏng cơ cấu Rocker-Bogie của xe tự hành NASA. Khi bánh xe chèn lên gờ cửa (tối đa 12 mm), các thanh đòn (linkages) sẽ chuyển đổi lực nâng thành lực ép xuống các bánh xe còn lại, giúp thân máy không bị nghiêng.
Đặc biệt, hệ thống sử dụng Dynamic CoG Control (Kiểm soát trọng tâm động). Các bộ truyền động điện (actuators) liên tục thay đổi độ cứng của phuộc để tạo ra lực phản hồi ngược chiều với gia tốc hướng tâm khi máy vào cua, qua đó triệt tiêu lực ly tâm tác động lên bề mặt chất lỏng.
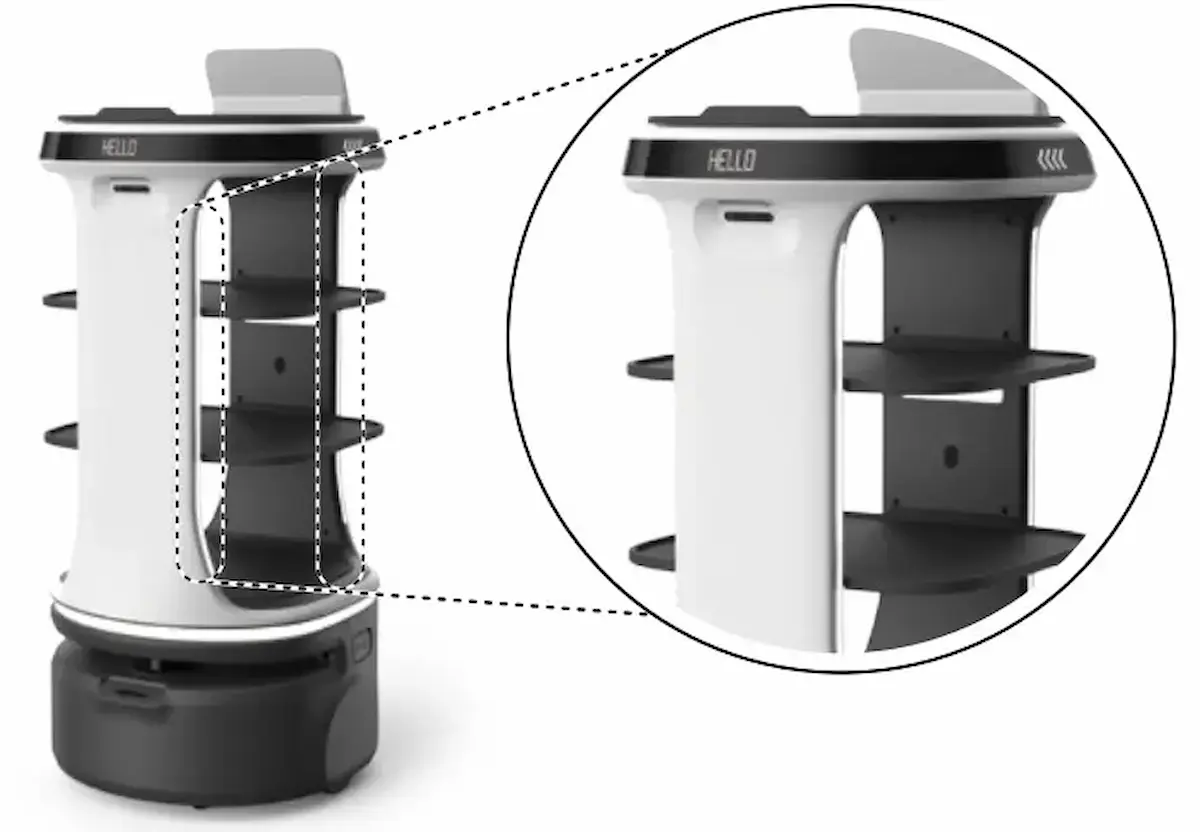
Vật liệu kháng môi trường F&B Khác với nhựa ABS trên các thiết bị gia dụng, vỏ ngoài của Servi Plus được đúc từ Makroblend® UT (hỗn hợp Polycarbonate và Polyester). Sự kết hợp này mang lại khả năng chống va đập cơ học và kháng hóa chất vượt trội. Lớp vỏ PET giúp máy không bị ăn mòn bởi dầu mỡ thực phẩm và chịu được các hóa chất tẩy rửa công nghiệp cường độ cao. Hệ thống khay nhựa polymer cũng đạt chuẩn NSF, không có khe hở cơ khí tích tụ vi khuẩn.
2. Lõi AI: Bức tranh Cảm biến đa tầng
Kiến trúc nhận thức của máy hoạt động dựa trên nguyên lý Sensor Fusion (Hợp nhất dữ liệu cảm biến) để bù trừ các “điểm mù” môi trường.
- 2D LiDAR (Quét Laser 2D): Sở hữu góc quét ngang 230 độ và tầm hoạt động 20 m. Nhiệm vụ chính là tạo bản đồ đám mây điểm. Điểm mù cốt lõi của linh kiện này là không thể nhận diện vách kính trong suốt hoặc bề mặt gương (tạo ra ảo ảnh hành lang sâu).
- 3D Depth Sensor (Cảm biến chiều sâu 3D): Quét phạm vi 2.5 m để phát hiện các vật thể lơ lửng không nằm trong mặt phẳng quét của tia laser (ví dụ: mép bàn nhô ra, khay đựng bàn phím).
- Load Cells (Cảm biến trọng lượng): Được gắn dưới mỗi điểm tựa khay với độ phân giải cực nhạy lên tới 10g. Điều này giúp máy tự động nhận biết ngay lập tức khi khách hàng nhấc một tách cà phê ra khỏi khay để tiếp tục lộ trình mà không cần thao tác bấm nút.
- IMU (Bộ đo lường quán tính): Gồm gia tốc kế và con quay hồi chuyển 3 trục, cung cấp dữ liệu về độ nghiêng và độ rung của khung gầm.
3. Đo lường Độ trễ xử lý (Latency) và Sai số vận hành
Khả năng sinh tồn của robot phụ thuộc vào Control Loop (Vòng lặp điều khiển), tốc độ nó nhận diện vật cản động và ra lệnh phanh.
Bài toán đánh đổi ở khả năng dừng khẩn cấp (E-stop) Máy sử dụng thuật toán DWA (Dynamic Window Approach) để tìm quỹ đạo né tránh. Dù hệ thống cập nhật trạng thái từ 10 đến 30 lần mỗi giây (10-30 Hz), nó vẫn bị ràng buộc bởi giới hạn vật lý của mạch điện:
- Trễ quét từ cảm biến LiDAR: ~100 ms.
- Trễ truyền dẫn dữ liệu nội bộ: 5 – 20 ms.
- Trễ tính toán (Chip SoC ra quyết định phanh): 30 – 50 ms.
Tổng Latency (Độ trễ xử lý hệ thống) rơi vào khoảng 150 – 200 ms. Theo nguyên lý động lực học, khi lao đi với tốc độ 1.2 m/s, cỗ máy sẽ trôi thêm một quãng đường từ 18 đến 24 cm trước khi cơ cấu phanh điện từ thực sự hãm bánh. Do đó, việc thiết lập khoảng cách an toàn tối thiểu 0.5 mét là rào cản tích hợp bắt buộc để tránh va chạm với con người xuất hiện đột ngột trong không gian hẹp.
Xử lý sai lệch định vị (Map Drift) Khi di chuyển trên sàn bếp ướt hoặc trơn mỡ, bánh xe (encoder) sẽ bị trượt, dẫn đến việc dữ liệu đo quãng đường mâu thuẫn trực tiếp với dữ liệu laser. Để giải quyết, thuật toán Extended Kalman Filter (Lọc Kalman mở rộng) được kích hoạt để trộn lẫn dữ liệu quán tính từ IMU, qua đó bù đắp sai số và giữ cho máy không bị “lạc đường” giữa không gian làm việc.
Kết luận từ ROWOR
Nhìn sâu vào bo mạch và hệ thống cơ khí, Bear Robotics Servi Plus là một khối cơ điện tử có độ phức tạp kỹ thuật cao. Việc rã máy và thấu hiểu ranh giới của cơ cấu Rocker-Bogie cũng như độ trễ 200ms của lõi SLAM giúp doanh nghiệp thiết lập một môi trường làm việc thực dụng nhất. Không có máy móc nào hoàn hảo, việc của nhà quản trị là nắm rõ giới hạn kỹ thuật để “ứng viên” này phát huy 100% năng suất, tối ưu hóa bài toán ROI trong dài hạn.
/ Chuỗi bài robot Servi Plus
- Bài 1: Đánh giá hiệu năng Robot phục vụ F&B: Bear Robotics Servi Plus
- Đang đọc bài 2: Phân tích cấu trúc phần cứng và cảm biến: Bear Robotics Servi Plus
- Bài 3: Rào cản tích hợp hệ thống Robot nhà hàng: Bear Robotics Servi Plus

{kind=link}