
Khám sức khỏe “ứng viên” Figure 02: Đằng sau lớp vỏ bọc thiết kế tương lai là những giới hạn về nhiệt động lực học, hao hụt năng lượng và sự mỏng manh của tay gắp cơ khí. Đây chính là lỗ hổng chi phí vận hành (OPEX) mà các bản thông cáo ít được đề cập tới.
Cái Bẫy Tải Trọng (Payload) Và Nút Thắt “Zero RPM”
Trên giấy tờ, Figure 02 được quảng cáo với mức tải trọng (Payload) danh định là 20kg cho toàn thân và 25kg lực nâng tối đa ở hai tay. Con số này được hãng thiết kế khéo léo để tạo cảm giác “ứng viên robot” này có sức vóc tương đương giới hạn bốc vác an toàn của một lao động nam giới. Tuy nhiên, dưới góc độ kỹ thuật cơ điện, tải trọng đỉnh (Peak payload) và tải trọng vận hành liên tục (Continuous payload) là hai khái niệm hoàn toàn khác biệt.
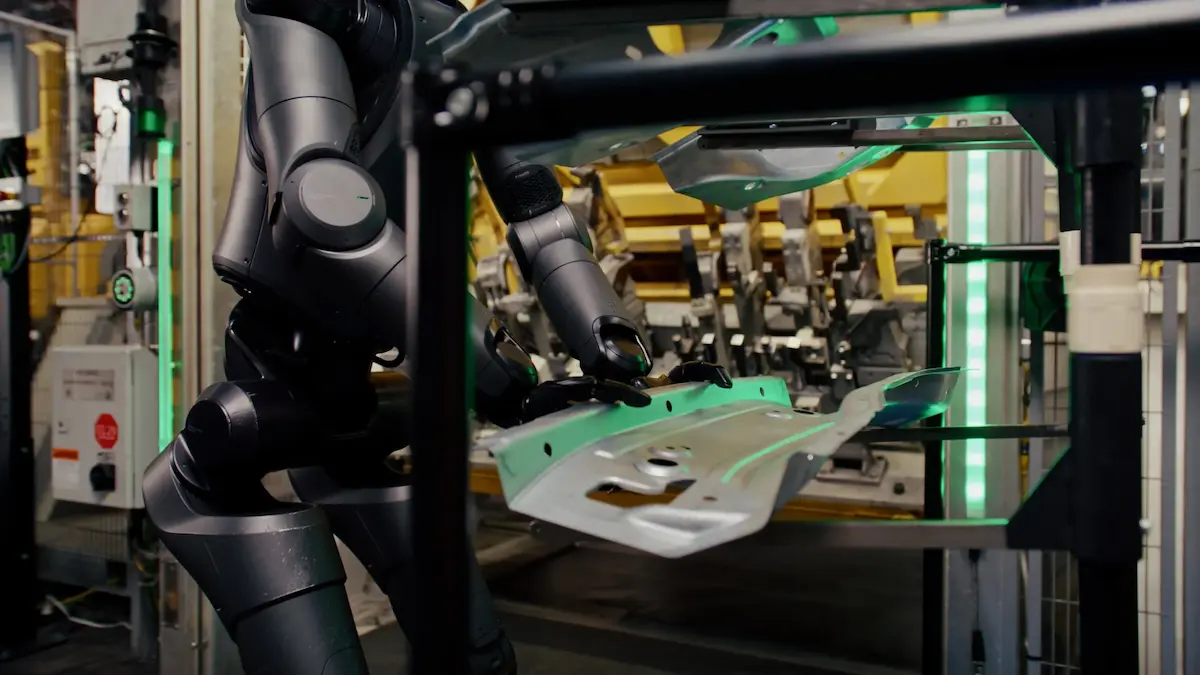
Khi Bản mô tả công việc (JD) yêu cầu Figure 02 bưng một tấm thép nặng và đi bộ qua lại trên mặt sàn xưởng, hệ thống động cơ điện ở các khớp phải tạo ra lực mô-men xoắn giữ tĩnh. Lúc này, động cơ không quay (Zero RPM – 0 vòng/phút), dẫn đến lực điện động ngược (back-Electromotive Force) bằng không. Hệ thống lúc này biến thành một điện trở thuần túy, cắn dòng điện cực lớn và xả ra lượng nhiệt năng khổng lồ.
Với thiết kế động cơ làm mát bằng không khí (Air-cooled actuators) thay vì tản nhiệt chất lỏng, nếu bị ép giữ mức tải 20kg liên tục, cuộn dây bên trong sẽ nóng chảy chỉ sau dưới 2 phút. Sự thật kỹ thuật chỉ ra rằng: Tải trọng vận hành liên tục của ứng viên này chỉ loanh quanh ở mức 25-30% công suất đỉnh, tức là khoảng 5 đến 7kg.
Nghiêm trọng hơn, lượng nhiệt tích tụ này sẽ truyền thẳng vào bộ khung kim loại, gây ra hiện tượng trôi nhiệt (Thermal drift) – sự giãn nở vật lý làm sai lệch tọa độ gốc. Trong khi BMW yêu cầu độ dung sai đặt để linh kiện là 5mm, hiện tượng trôi nhiệt ở các khớp chân và hông sẽ khuếch đại sai số lên tận cổ tay, khiến cỗ máy hoàn toàn mất đi sự chính xác vào cuối ca làm việc nếu không liên tục dùng camera để bù trừ.
Hao Hụt kWh Và Trò Chơi “Thay Pin Nóng” Cốt Tử
Một cỗ máy robot hình người nặng 70kg, mang trên mình hai card đồ họa NVIDIA RTX để chạy trí tuệ nhân tạo và hàng chục động cơ servo liên tục gồng giữ thăng bằng là một “con quái vật” ngốn điện.
Figure AI trang bị cho ứng viên này khối pin lithium-ion dung lượng 2.25 kWh tích hợp ngay trong thân ngực nhằm hạ thấp trọng tâm. Hãng tuyên bố thời lượng pin đạt 5 tiếng. Tuy nhiên, khi bị ném vào dây chuyền bốc vác nhịp độ cao (84 giây/chu kỳ) tại xưởng BMW, thời lượng pin thực tế khi chịu tải nặng chắc chắn tụt dốc thảm hại, ước tính cạn kiệt chỉ trong vòng dưới 3 tiếng.
Đây là lúc Tỷ lệ thời gian làm việc trên thời gian sạc (Work-to-Charge Ratio) bóp nghẹt năng suất. Với thời gian sạc đầy mất 1.5 tiếng, nếu để cỗ máy tự bò về trạm sạc, dây chuyền sẽ phải gánh chịu 33% thời gian chết (Downtime).
Để giải quyết vấn đề, hãng thiết kế cơ chế thay pin nóng (Hot-swapping). Tức là giữa ca làm việc 10 tiếng, sẽ phải có một nhân sự con người (hoặc một robot chuyên dụng khác) chạy lại, rút khối pin 2.25 kWh nặng trịch ra và nhét khối mới vào. Điều này làm sai lệch viễn cảnh “dây chuyền tự động hóa 100% không cần người can thiệp”, đồng thời làm đội chi phí nhân sự bảo trì (OPEX) lên một mức phi lý.
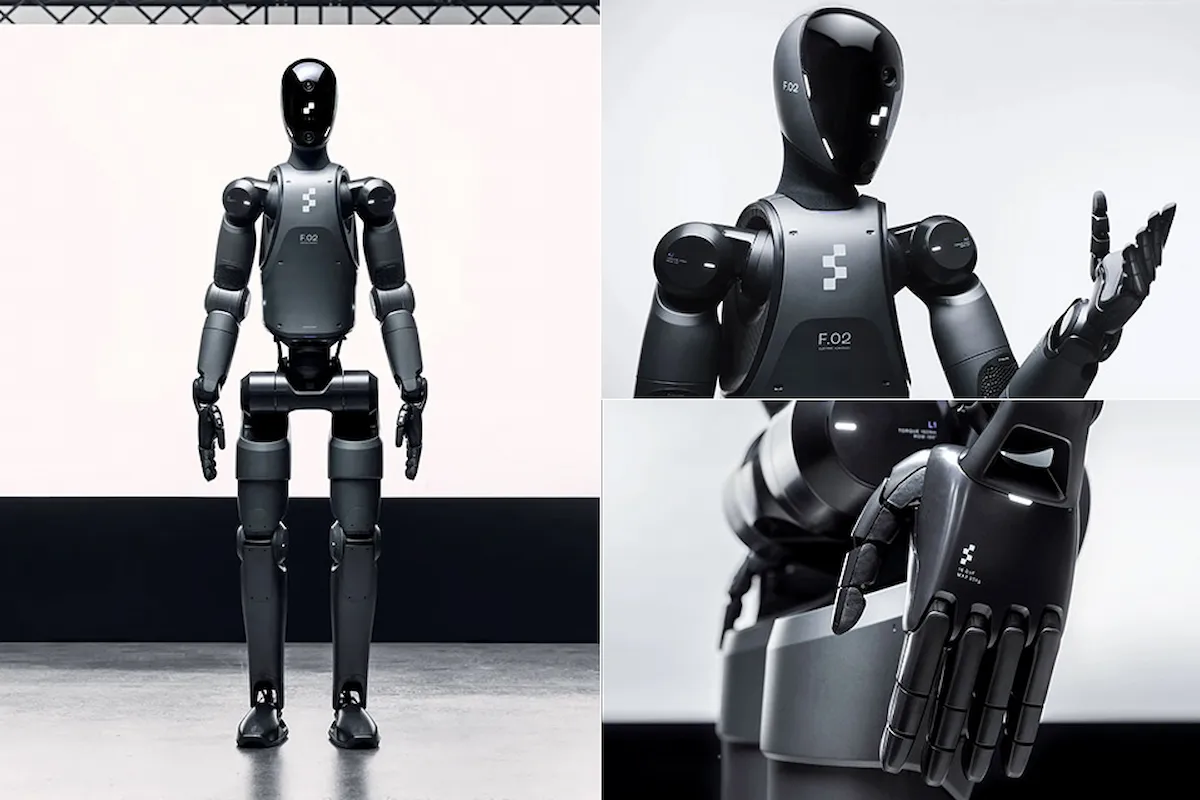
Tay Gắp 16 Bậc Tự Do: Tử Huyệt Bảo Trì Dây Chuyền
Bàn tay con người là một kiệt tác sinh học, nhưng việc cố gắng sao chép nó thành một hệ thống cơ khí 16 bậc tự do (16-DOF – Degrees of Freedom) lại là một bước lùi về độ tin cậy công nghiệp.
Figure 02 từ bỏ loại tay gắp song song (Parallel-jaw grippers) “nồi đồng cối đá” của robot truyền thống để dùng bàn tay 5 ngón nhồi nhét hàng tá mô-tơ siêu nhỏ, cáp truyền động và bánh răng. Kết quả kiểm thử 1.250 giờ tại BMW đã chỉ đích danh: Cụm cẳng tay và cổ tay chính là nguyên nhân gây hỏng hóc phần cứng (Hardware failure point) số một của toàn bộ hệ thống.
Sự lặp lại liên tục của các chu kỳ bốc vác, kết hợp với các bó cáp động (Dynamic cabling) bị uốn éo liên tục qua các khớp xoay đã làm hư hỏng kết nối vật lý. Bảng mạch in (PCB – Printed Circuit Board) phân phối tín hiệu ở cẳng tay không chịu nổi ứng suất cơ học và nhiệt độ, dẫn đến tê liệt tín hiệu.
Hãy nhìn thẳng vào bài toán năng suất: Trong khi một cánh tay robot công nghiệp 6 trục tiêu chuẩn có Tỷ lệ hỏng hóc cực thấp (0.0001%), bộ tay gắp 16-DOF của Figure 02 lại kéo tụt Thời gian trung bình giữa các lần hỏng hóc (MTBF – Mean Time Between Failures) xuống mức báo động đỏ. Doanh nghiệp sẽ phải đối mặt với một lịch trình bảo dưỡng dày đặc, đòi hỏi các kỹ sư cơ điện bậc cao liên tục tháo ráp các chi tiết vi cơ khí vô cùng tốn kém.
Bài Toán Đầu Tư: Đừng Trả Tiền Cho Phòng Thí Nghiệm
Dưới góc nhìn khắt khe của một người làm tuyển dụng máy móc, phần cứng của Figure 02 tại BMW vẫn mang dáng dấp của một bản thử nghiệm Chứng minh Khái niệm (PoC) đắt đỏ hơn là một chiến binh công nghiệp dạn dày sương gió. Sự mỏng manh của tay gắp và giới hạn nhiệt động lực học của động cơ điện làm mát bằng không khí chứng minh rằng: Ranh giới giữa video PR và thực chiến xưởng cơ khí là rất xa.
Cụm bài phân tích robot hình người Figure 02
- Bài 1: Đánh giá Hiệu năng Robot Hình người: Sự thật Kỹ thuật từ Figure 02 tại BMW
- Đang đọc bài 2: Phẫu Thuật Phần Cứng Figure 02: Sự Thật Về Tải Trọng 20kg Và Hao Hụt kWh
- Bài 3: Đánh giá Lõi AI Figure 02: Khi Mô hình Ngôn ngữ “Mù Điếc” Tại Xưởng BMW
- Bài 4: Đánh giá Tỷ suất Hoàn vốn (ROI) Figure 02: Cú Sốc CAPEX Và Rào Cản Tích Hợp

{kind=link}