
Nếu Bản mô tả công việc (JD) cho chúng ta biết một “nhân sự tự động” có thể làm gì, thì việc rã máy (Teardown) sẽ trả lời câu hỏi: Cỗ máy đó sẽ tồn tại được bao lâu trên mặt sàn bê tông khốc liệt của nhà máy.
Trong hệ sinh thái robot hình người, Apptronik Apollo sở hữu một kiến trúc phần cứng đi ngược lại hoàn toàn với số đông. Bài viết này sẽ đặt cấu trúc vật lý của Apollo lên bàn soi, bóc tách từng hệ thống truyền động, đo lường mức độ hao hụt điện năng và chỉ đích danh những điểm mù cơ khí mà các bản báo cáo bán hàng thường giấu kín.
Lõi truyền động: Bài toán hiệu năng và hao hụt điện năng Apollo
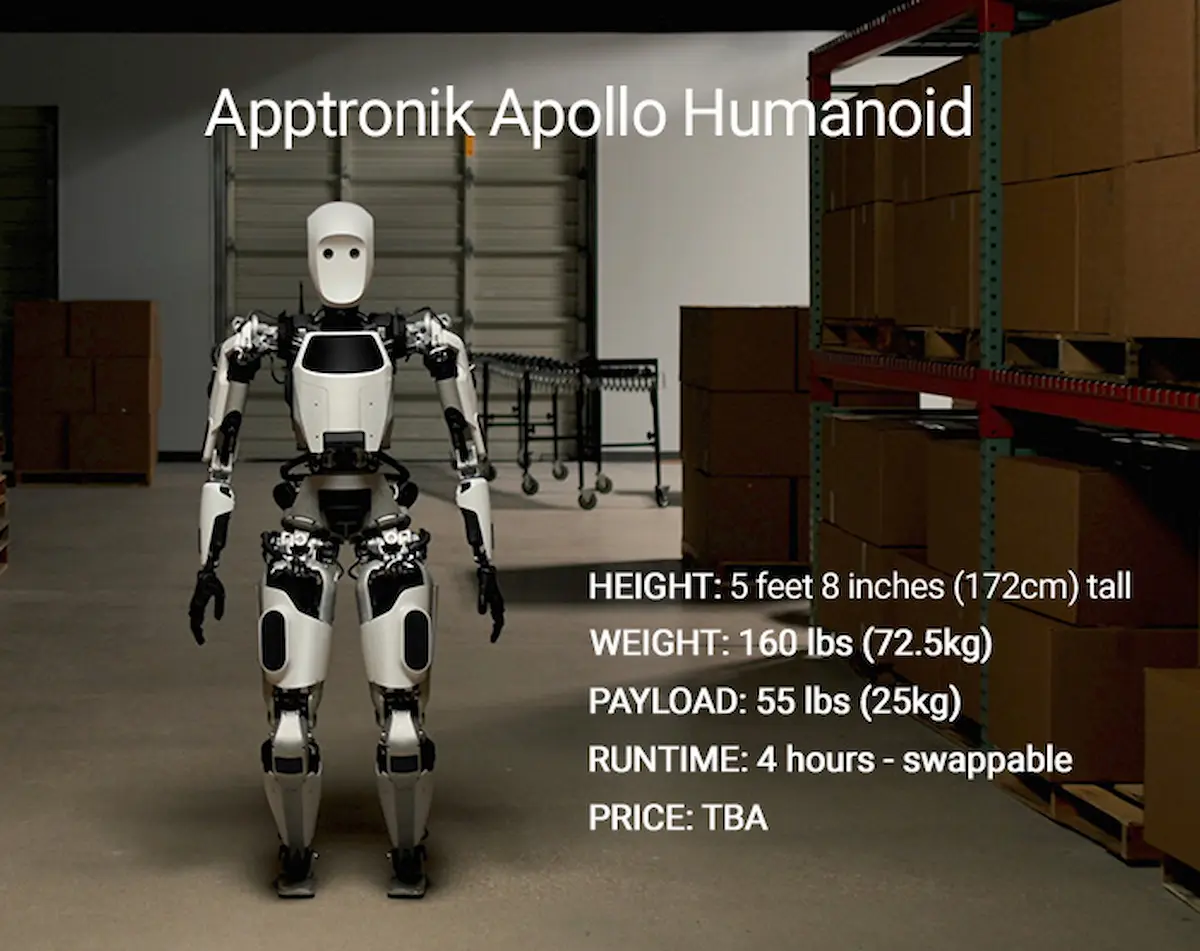
Hầu hết các “ứng viên” trên thị trường hiện nay (như Tesla Optimus hay Figure 02) đều sử dụng động cơ xoay kết hợp hộp số truyền thống, hoặc hệ thống thủy lực ồn ào và dễ rò rỉ. Apollo lại chọn một con đường hoàn toàn khác biệt để đối phó với bài toán trọng lượng 72.6kg và tải trọng bốc vác 25kg.
- Truyền động lực trực tiếp: Thay vì dùng động cơ xoay, các khớp chịu lực chính của Apollo (đầu gối, hông, khuỷu tay) sử dụng Linear Actuators (Truyền động tuyến tính). Hệ thống này ứng dụng cấu trúc Planetary roller screws (Trục vít con lăn hành tinh) giúp chuyển hóa trực tiếp lực từ trường thành lực đẩy/nâng phương thẳng đứng. Thiết kế này triệt tiêu ma sát dư thừa từ các bánh răng trung gian, giúp tay chân robot thanh mảnh hơn nhưng lại có sức mạnh đẩy tạ vượt trội.
- Tối ưu hóa hao hụt kWh: Lực nâng càng lớn, nhiệt lượng tỏa ra do điện trở càng cao. Để tránh tình trạng thất thoát năng lượng vô ích, Apollo sử dụng hệ thống điện cao áp (100V) kết hợp với các mô-đun bán dẫn Gallium Nitride (GaN) từ Texas Instruments. Công nghệ lõi này cho phép giảm thiểu tối đa hiện tượng hao hụt nhiệt (Joule heating), chuyển hóa trọn vẹn từng kWh hóa năng từ pin thành động năng thực tế trên sàn kho.
Điểm mù vật lý: Sai lệch nhiệt và rào cản tay gắp
Một cấu trúc phần cứng tốt trong phòng thí nghiệm chưa chắc đã sống sót khi đối mặt với những tác vụ vận hành liên tục có tính hỗn loạn. “Rã máy” Apollo cho thấy hai rào cản vật lý cực kỳ nghiêm trọng cần được đưa vào hồ sơ đánh giá tích hợp hệ thống:
- Thermal Drift (Sai lệch nhiệt): Hệ thống trục vít con lăn hành tinh yêu cầu độ chính xác cơ khí gần như tuyệt đối. Tuy nhiên, khi robot phải liên tục gánh vác tải trọng 25kg trong nhiều giờ liền ở môi trường nhà máy không có điều hòa, nhiệt lượng tích tụ sẽ làm lõi thép của trục vít giãn nở. Sự giãn nở cấp độ micromet này dẫn đến “sai lệch nhiệt”, khiến tọa độ tay gắp của robot bị lệch so với tính toán của hệ thống điều khiển trung tâm. Nếu thiếu các thuật toán bù trừ độ trễ vi giây (Microsecond latency compensation), robot sẽ vươn tay hụt hoặc làm rơi vỡ hàng hóa.
- Rào cản tải trọng ngang tại tay gắp: Để linh hoạt, Apollo sở hữu tới 71 bậc tự do, tập trung phần lớn ở End-of-arm tooling (EOAT – Tay gắp/Cơ cấu tác động cuối). Điểm yếu chết người xuất hiện khi robot phải bốc vác các Irregular totes (Thùng hàng bất đối xứng) nơi trọng tâm vật lý liên tục xê dịch. Truyền động tuyến tính ở cánh tay chỉ chịu được lực dọc trục. Khi thùng hàng bị lệch trọng tâm, nó tạo ra Torsional shearing (Lực cắt xoắn) và Side-loading (Tải trọng ngang) cực mạnh lên các chốt khớp cổ tay. Việc liên tục chịu lực bẻ ngang này sẽ nhanh chóng phá hủy các ren vi cơ khí, dẫn đến tình trạng gãy gập hoặc trượt nhịp tay gắp.
Kiến trúc năng lượng: Chìa khóa cho Uptime 24/7
Năng lực vật lý của robot trở nên vô nghĩa nếu cỗ máy đó ở trạm sạc điện thường xuyên. Giống như việc chúng ta không thể trả lương cho một nhân viên chỉ làm việc được 2 tiếng rồi nghỉ giải lao 4 tiếng.
Kiến trúc phần cứng của Apollo xử lý triệt để bài toán này bằng thiết kế Hot-swappable battery (Pin tháo rời nóng).
Thay vì gắn chết khối pin nặng nề vào thân máy, cấu trúc của Apollo cho phép thay pin chỉ trong vài phút mà không làm gián đoạn hệ thống hệ điều hành lõi. Với thời gian hoạt động lý thuyết lên tới 4 tiếng cho mỗi viên pin, một trạm luân chuyển pin tốt có thể đẩy Uptime (Thời gian hoạt động thực tế) của cỗ máy này lên 22/24h. Sự tách bạch giữa sức lao động vật lý của robot và giới hạn thời gian sạc của hóa chất Lithium-ion chính là đòn bẩy quan trọng nhất giúp tối ưu hóa OPEX trong một chuỗi cung ứng khép kín.
Đánh giá của ROWOR: Về mặt cơ khí, Apollo là một cỗ máy được thiết kế cực kỳ thực dụng cho công tác hậu cần. Việc ứng dụng truyền động tuyến tính và kiến trúc điện GaN cho thấy Apptronik hiểu rất rõ bài toán chi phí tiêu thụ năng lượng. Tuy nhiên, các nhà quản lý kho bãi cần đặc biệt lưu tâm đến điểm mù cơ học tại cơ cấu tay gắp. Tuyệt đối không giao cho Apollo xử lý các thùng hàng chứa chất lỏng hoặc vật phẩm biến thiên trọng tâm nếu không muốn ngân sách bảo trì (OPEX) bị thổi bay bởi các sự cố đứt gãy cổ tay robot.
/ Chuỗi bài viết về robot Apollo của Apptronik:
- Bài 1: Đánh giá bài toán đầu tư và hiệu năng bốc xếp của robot hình người: Apptronik Apollo
- Đang đọc bài 2: Rã máy Robot Hình người: Đánh giá cấu trúc phần cứng và năng lượng lõi trên Apptronik Apollo
- Bài 3: Kiểm tra “não bộ” Robot hình người Apptronik Apollo: Lõi AI, Độ trễ xử lý và Rào cản tích hợp hệ thống
- Bài 4: Báo cáo Thử việc: Kiểm thử thực chiến Robot Apptronik Apollo tại nhà máy Mercedes-Benz

{kind=link}