
Sự sụp đổ của K-Scale Labs vào cuối năm 2025 phơi bày một nghịch lý tàn nhẫn của ngành công nghiệp tự động hóa: Có nguồn vốn khổng lồ, sở hữu các mô hình AI thông minh nhất, nhưng sản phẩm vật lý vẫn gục ngã. Dưới lăng kính của một Đại lý Nhân sự Robot (Robot HR Agency), đây không phải là câu chuyện gọi vốn thất bại. Đây là hệ quả tất yếu khi thị trường viết sai “Bản mô tả công việc” (Job Description), dung túng cho những ứng viên bị thổi phồng kỹ năng mềm (Mô hình ngôn ngữ, Thị giác máy tính) nhưng lại hổng toàn diện về an toàn lao động cơ khí.
Dưới đây là bản phân tích kỹ thuật từ RobotWorks.vn, bóc trần những điểm yếu phần cứng định đoạt sự sống còn của một hệ thống nhân sự máy móc.
1. Phân Tích Kỹ Thuật: 3 Lỗ Hổng Tử Huyệt Trong “Bản CV” Của Ứng Viên Robot
Hệ thống thẩm định năng lực của chúng ta không bị lóa mắt bởi các bản demo trên GitHub. Năng suất thực chiến được đo lường bằng dung sai vật lý và sức bền vật liệu.
Lỗ hổng 1: Căn bệnh “Thượng tôn AI” và sai lầm về động học nghịch
Đội ngũ phát triển đã tranh cãi gay gắt về việc loại bỏ mechanical end stops (công tắc hành trình cơ học) ở các khớp nối, với niềm tin ngây ngô rằng AI Policy sẽ tự học được giới hạn biên nhằm giảm chi phí vật tư.
- Thực tế vật lý: Một chốt chặn cơ học không chỉ là một cục sắt. Khi cánh tay robot vung với mô-men xoắn tối đa, nếu chỉ dựa vào chốt cứng, động năng (kinetic energy) dội ngược sẽ xé toạc hộp số. Thiết kế tiêu chuẩn yêu cầu cơ chế trượt (slip clutches) hoặc phần tử đàn hồi (Series Elastic Actuators – SEA) để hấp thụ lực.
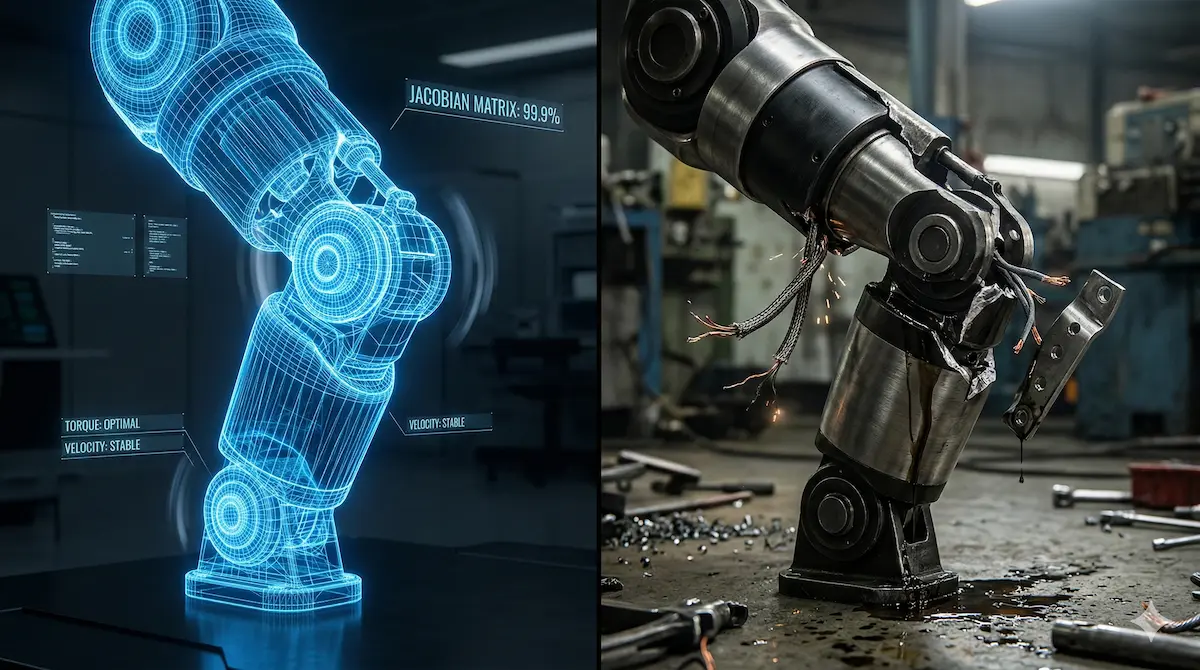
- Biến cố toán học: Trong quá trình tính toán Động học nghịch (Inverse Kinematics), nếu AI vô tình đưa khớp robot lọt vào “điểm kỳ dị” (Singularity) trên Ma trận Jacobian, hệ thống sẽ yêu cầu một vận tốc khớp tiến tới vô cực. Hậu quả? Dòng điện quá tải và bo mạch điều khiển bốc cháy chỉ trong vài mili-giây. Một AI đúng 99.99% là vô nghĩa khi 0.01% sai số nướng chín phần cứng của bạn.
Lỗ hổng 2: Động cơ không phải là ván trượt – Sự thật về “Hàng hóa hóa”
Giới đầu tư mộng tưởng rằng robot hình người sẽ đi theo đường cong chi phí của xe điện cân bằng (hoverboard), được gia công đại trà và rẻ hóa nhanh chóng.
- Bản chất cơ điện tử: Động cơ hoverboard là loại BLDC rẻ tiền, chỉ cần xoay. Ngược lại, khớp nối humanoid sử dụng công nghệ truyền động QDD (Quasi-Direct Drive) hoặc hộp số sóng hài (Strain Wave Gearing), ép một lực mô-men xoắn khổng lồ vào không gian siêu nhỏ (tỷ số truyền 1:50 hoặc 1:100).
- Dung sai công nghiệp: Trong chế tạo thân vỏ, lệch 2mm có thể chấp nhận. Nhưng ở hộp số robot, độ rơ khe hở bánh răng (backlash) được tính bằng arc-minute (phút góc), và dung sai chế tạo tính bằng micromet ($\mu m$). Bạn không thể “đi chợ” để mua sự chính xác của hộp số Harmonic Drive, bộ mã hóa vị trí tuyệt đối (Absolute Encoders) của Renishaw hay bộ điều khiển servo siêu nhỏ của Elmo Motion Control. Hệ sinh thái này hoàn toàn chưa được “hàng hóa hóa” (commoditized).

Lỗ hổng 3: Vận tốc R&D Ảo và Trạng thái “Pilot Purgatory”
Việc đánh tráo khái niệm giữa “tốc độ hoàn thiện sản phẩm” và “số lượng commit code” đã đẩy các dự án vào chỗ chết. Việc cắt xén quy trình hiệu chuẩn cảm biến (calibration) để kịp chạy demo sinh ra những cỗ máy què quặt. Hậu quả là ứng viên robot liên tục trượt bài kiểm tra hiện trường, vĩnh viễn kẹt lại ở trạng thái Pilot Purgatory (Đình trệ ở giai đoạn thử nghiệm) mà không bao giờ được đưa vào dây chuyền sản xuất chính thức.
2. Lăng Kính Robot HR: Bài Toán Lợi Nhuận (ROI) Của Năng Suất
Một hệ thống tự động hóa chỉ sinh ra năng suất dương khi rủi ro vật lý được kiểm soát. Chúng ta cần dịch thuật các thông số kỹ thuật sang ngôn ngữ của quản trị nhân sự:
- Tỷ lệ giữ chân ứng viên (Retention Rate): Trong thế giới máy móc, đây chính là chỉ số MTBF (Mean Time Between Failures – Thời gian trung bình giữa các lần hỏng hóc).
- Chi phí trả lương cho thời gian chết (Downtime Cost): Việc sở hữu một ứng viên được lắp ráp từ các linh kiện độc bản (không có Standard BOM) đồng nghĩa với việc không có sẵn phụ tùng thay thế. Chi phí tuyển dụng (CAPEX) ban đầu có thể rẻ, nhưng khi một khớp nối gãy, dây chuyền phải chờ hàng tuần để gia công lại linh kiện. Chi phí vận hành (OPEX) do downtime bốc hơi hàng chục ngàn USD mỗi giờ mới là thứ thực sự giết chết biên lợi nhuận của nhà máy.
3. Tầm Nhìn 2030: Sàng Lọc “Nhân Sự” Tại Các Đại Công Xưởng Việt Nam
Hướng tới năm 2030, Việt Nam định hình là đại công xưởng của các tập đoàn FDI lớn trong lĩnh vực điện tử, bán dẫn và xe điện. Các nhà máy này không mua “robot tàng hình trên GitHub” hay những khung sắt chạy ROS 2 mã nguồn mở lỏng lẻo nhập khẩu từ các xưởng gia công lân cận.
Thứ họ mua là Cam kết mức dịch vụ (SLA – Service Level Agreement) với uptime đạt 99.9%. Việc viết code điều khiển hành vi thì dễ, nhưng đơn vị nào đủ năng lực đứng ra bảo hành và chịu trách nhiệm cho mức SLA cơ khí đó? Đó chính là khoảng trống thị trường mà một công ty robot cần lấp đầy: Đơn vị kiểm toán năng lực chuyên sâu, bảo lãnh rủi ro vật lý trước khi bất kỳ “ứng viên máy móc” nào được cấp phép bước vào chuỗi cung ứng.
Khuyến nghị chiến lược từ RobotWorks: Tuyệt đối không giải ngân cho các dự án tự động hóa chỉ dựa trên video demo năng lực AI. Mọi quyết định tuyển dụng robot phải bắt đầu từ bản báo cáo dung sai cơ khí và biên bản kiểm thử giới hạn chịu tải vật lý.

{kind=link}