
Trong bức tranh tự động hóa chuỗi cung ứng, Mobile Manipulator (sự kết hợp giữa đế tự hành AMR và cánh tay robot) được kỳ vọng là “siêu nhân sự” đa nhiệm. Tuy nhiên, dữ liệu thực chiến lại chỉ ra một điểm đứt gãy ROI rõ rệt: Phần lớn các hệ thống đang mắc kẹt ở giai đoạn Pilot Purgatory – thử nghiệm quy mô nhỏ thì thành công, nhưng thất bại toàn diện khi nhân rộng do chi phí bảo trì vượt kiểm soát.
Sự bất đối xứng thông tin giữa thông số tĩnh trên Datasheet và môi trường vận hành động là nguyên nhân cốt lõi. Dự thảo tiêu chuẩn ASTM WK92144, do Ủy ban F45.05 và NIST phát triển, ra đời không phải để tôn vinh công nghệ, mà đóng vai trò như một “Trung tâm Đánh giá Năng lực” (Assessment Center). Đây là bộ lọc cơ học định lượng, buộc các hệ thống phải chứng minh năng lực thực tế, loại bỏ các rủi ro đầu tư (CAPEX) dựa trên những lời hứa hẹn.
Quy Trình Kiểm Định Năng Lực Vận Hành: Đảm Bảo Độ Chính Xác Trong Môi Trường Sản Xuất
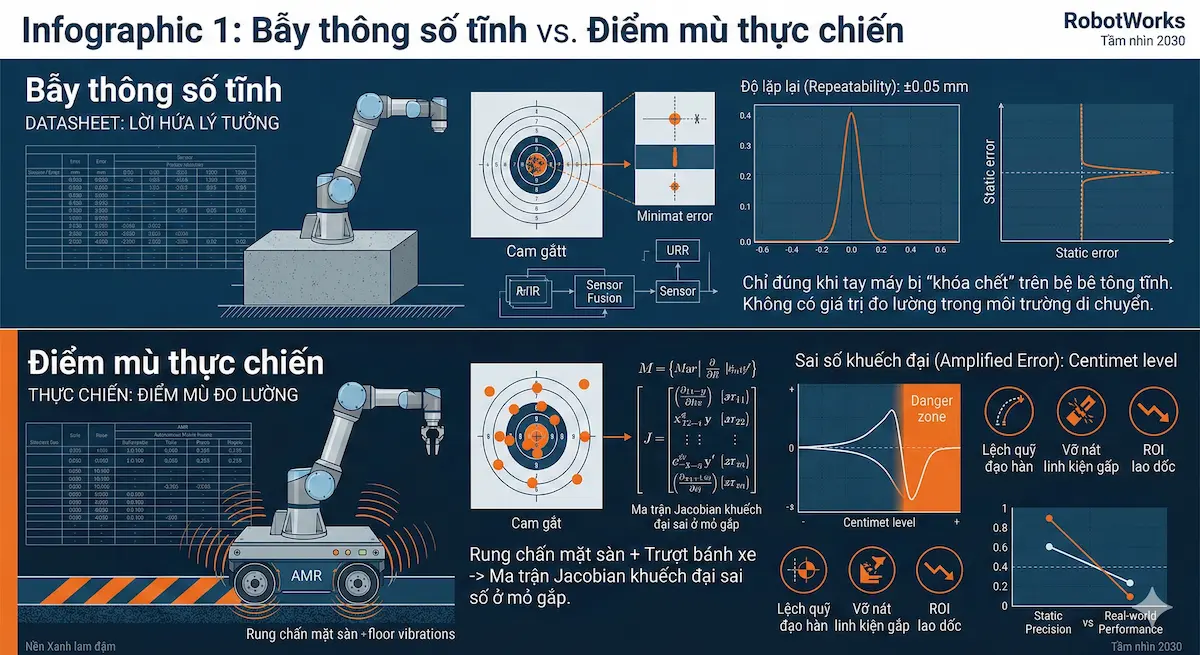
Sai lầm lớn nhất của các nhà quản lý nhà máy là tin vào chỉ số độ lặp lại (repeatability) ở mức ±0.05 mm in trên hồ sơ của cánh tay robot. Thông số này chỉ có giá trị khi hệ thống được bắt bulông cố định xuống một bệ bê tông tĩnh.
Khi đặt cánh tay đó lên một chiếc xe AMR chạy bằng bánh lốp, bài toán hoàn toàn thay đổi. Chỉ cần một rung động nhỏ từ việc bánh xe cán qua gờ giảm tốc, sai số sẽ truyền qua hệ thống treo và bị khuếch đại lên gấp nhiều lần tại mỏ gắp. Cánh tay vươn càng xa, độ lệch chuẩn càng lớn. Mua một “nhân sự” Mobile Manipulator chỉ dựa trên Datasheet của cánh tay là một quyết định tiềm ẩn rủi ro cực đoan về chất lượng phế phẩm.
Phân Tích Kinh Tế: Tác Động Của Tiêu Chuẩn Đến Tỷ Suất Hoàn Vốn Và Chi Phí Vận Hành
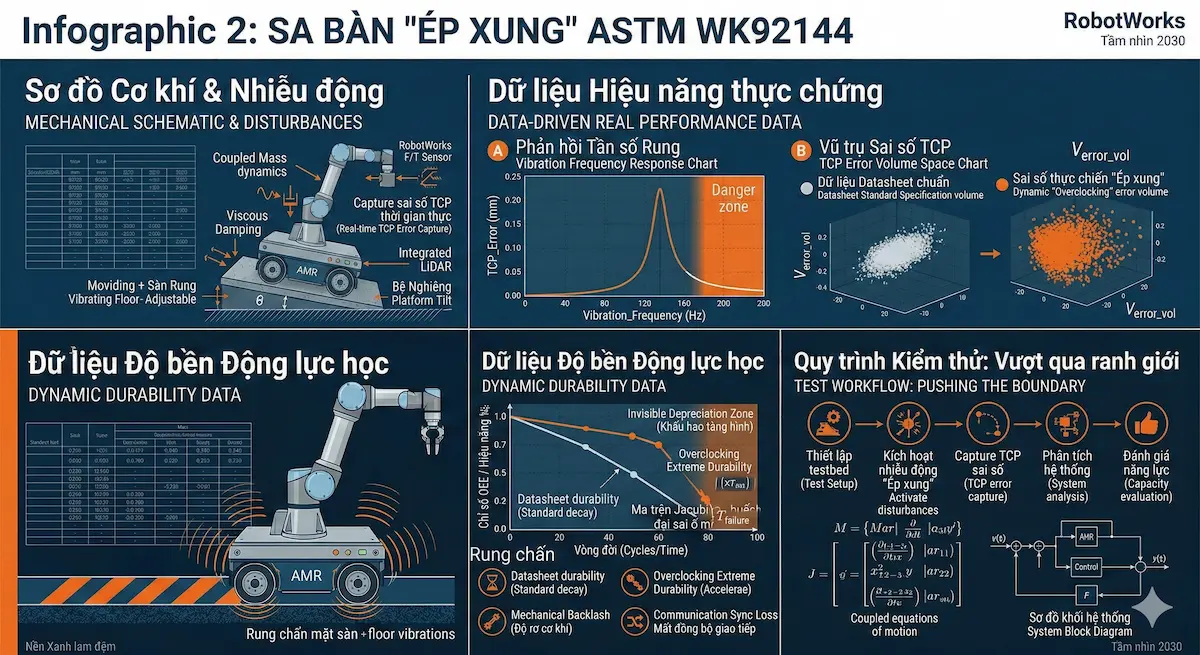
Thay vì tin vào các phần mềm mô phỏng môi trường lý tưởng, ASTM WK92144 thiết lập một sa bàn kiểm thử vật lý ép hệ thống đến biên an toàn tối đa:
- Bài toán Trọng tâm (CoG) & Khả năng chịu tải: Bàn thử nghiệm thay đổi góc thao tác liên tục từ 0 độ (phẳng) đến 45 độ (nghiêng) và 90 độ (đứng). Khi cánh tay mang tải nặng vươn xa, trọng tâm dịch chuyển đột ngột. Bài test này lật tẩy năng lực cơ khí thực sự: Hệ thống có bị lún nhíp giảm xóc làm lệch quỹ đạo không? Hộp số ở các khớp gốc có chịu được mô-men xoắn ngược hay sẽ bị lật nhào?
- Kiểm thử Nhiễu động Cơ học (Shaker Test): Bàn test được gắn bộ tạo rung giả lập mặt sàn nhà máy thực tế. Robot buộc phải thực hiện thao tác quỹ đạo chữ S (giả lập hàn, dán keo) hoặc lắp chốt (peg insertion) trong lúc bị rung lắc liên tục.
- Đo lường sự rời rạc hệ thống: Bàn sát hạch đo lường mức độ đồng bộ giữa hệ điều hành của đế AMR và bộ điều khiển cánh tay máy. Nếu có độ trễ giao tiếp (Jitter) khiến hệ thống không thể “vừa đi vừa thao tác” mượt mà, bài test sẽ ghi nhận lại toàn bộ dữ liệu sai lệch.
Thử Nghiệm Thực Chiến: Đo Lường Tải Trọng Và Mức Hao Hụt Năng Lượng Thực Tế
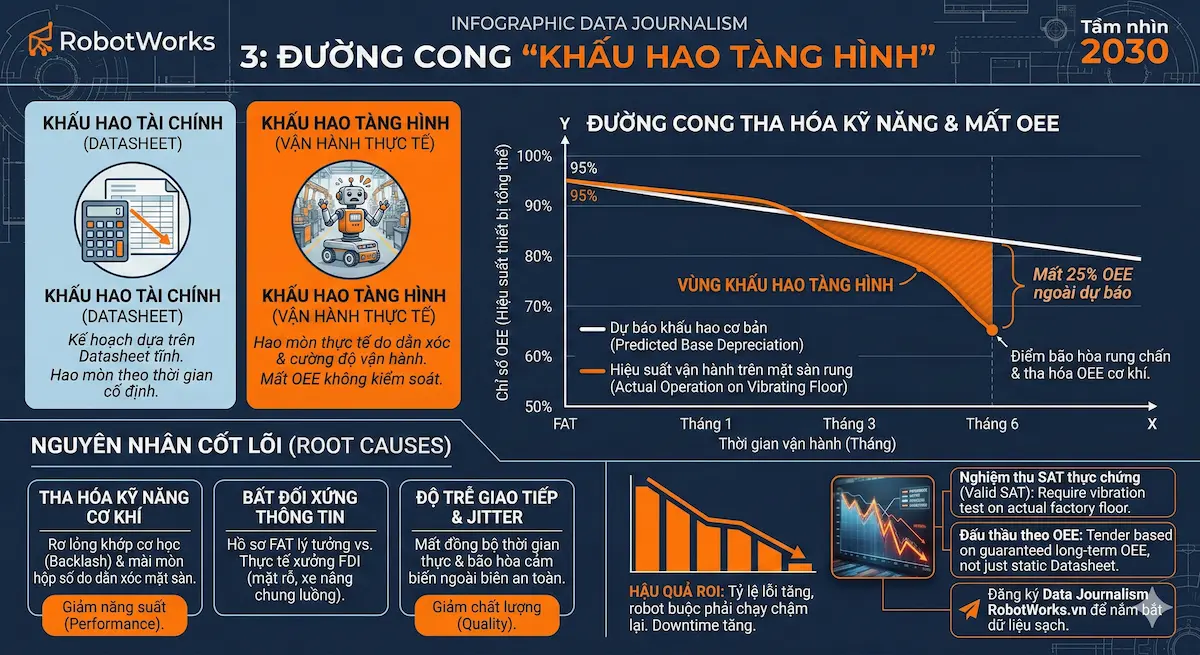
Dưới lăng kính quản trị của một Robot HR Agency, Mobile Manipulator cũng chịu sự “tha hóa kỹ năng” tương tự con người. Độ rơ cơ học (Backlash) hao mòn theo thời gian chính là nguyên nhân trực tiếp làm suy giảm hiệu suất lao động.
Tại các nhà máy FDI ở Việt Nam, nơi mặt sàn xưởng phủ epoxy thường xuyên xuất hiện vết lõm và luồng tuyến chung đụng với xe nâng (Forklifts), môi trường rung lắc là hằng số. Một hệ thống vượt qua bài nghiệm thu tĩnh (FAT) nhưng không có năng lực chịu tải động sẽ nhanh chóng bộc lộ sự tha hóa chỉ sau 6 tháng.
Sự rơ lỏng ở các khớp sẽ đánh gục chỉ số OEE (Hiệu suất thiết bị tổng thể):
- Quality (Chất lượng): Tỷ lệ lỗi linh kiện tăng cao do thao tác sai lệch.
- Performance (Hiệu suất): Robot buộc phải chạy chậm lại để tự bù trừ sai số rung lắc.
Hệ quả là Khấu hao tàng hình (Invisible Depreciation). Chỉ số MTBF (Thời gian trung bình giữa các lỗi) lao dốc, biến cỗ máy tối tân thành một gánh nặng chi phí bảo trì khổng lồ.
Lời khuyên chiến lược cho tầm nhìn 2030
Đến năm 2030, chuỗi cung ứng toàn cầu sẽ dịch chuyển từ “mua bán thiết bị” sang nền tảng “giao dịch năng suất” (Productivity Marketplace). Mọi quyết định tuyển dụng nhân sự tự động hóa phải được bảo chứng bằng dữ liệu cơ học minh bạch.
Các Giám đốc nhà máy và Kỹ sư tích hợp hệ thống cần loại bỏ tư duy nghiệm thu dựa trên thông số tĩnh. Dù ASTM WK92144 đang ở giai đoạn dự thảo, các nguyên lý kiểm thử của nó (bàn nghiêng, rung lắc) phải được đưa vào Biên bản Nghiệm thu tại xưởng (SAT) – tương đương với “thời gian thử việc” khắc nghiệt nhất. Không vượt qua các bài test thực chứng? Rớt thử việc, tạm dừng thanh toán (Payment Hold).

{kind=link}