
Khả năng thao tác trong một nhà máy không nằm ở trí tuệ nhân tạo, mà được quyết định bởi giới hạn cơ điện tử. Đối với “ứng viên” UBTECH Walker S, việc duy trì trạng thái đứng thẳng trong khi nâng vật nặng là một cuộc chiến liên tục chống lại trọng lực và nhiệt độ.
Trên bàn “rã máy” của RobotWorks ngày hôm nay, chúng ta sẽ bóc tách nền tảng vật lý của cỗ máy này, soi chiếu các thông số tàn khốc về độ lệch nhiệt và tốc độ cạn kiệt năng lượng thực tế trong một ca làm việc tiêu chuẩn.
1. Giải phẫu Cơ điện tử: Cuộc chạy đua Bậc tự do
Ở phiên bản Walker S đầu tiên, cấu trúc 41 bậc tự do (DoF – Degrees of Freedom) liên tục gặp tình trạng “khóa điểm kỳ dị” (Singularity locking), hiện tượng các khớp nối xếp thẳng hàng khiến cánh tay bị đơ tạm thời khi thao tác sâu bên trong khung gầm xe. Để đáp ứng Bản mô tả công việc (JD) khắc nghiệt của Zeekr và NIO, phiên bản Walker S2 đã bị ép phải nâng cấp lên 52 DoF.
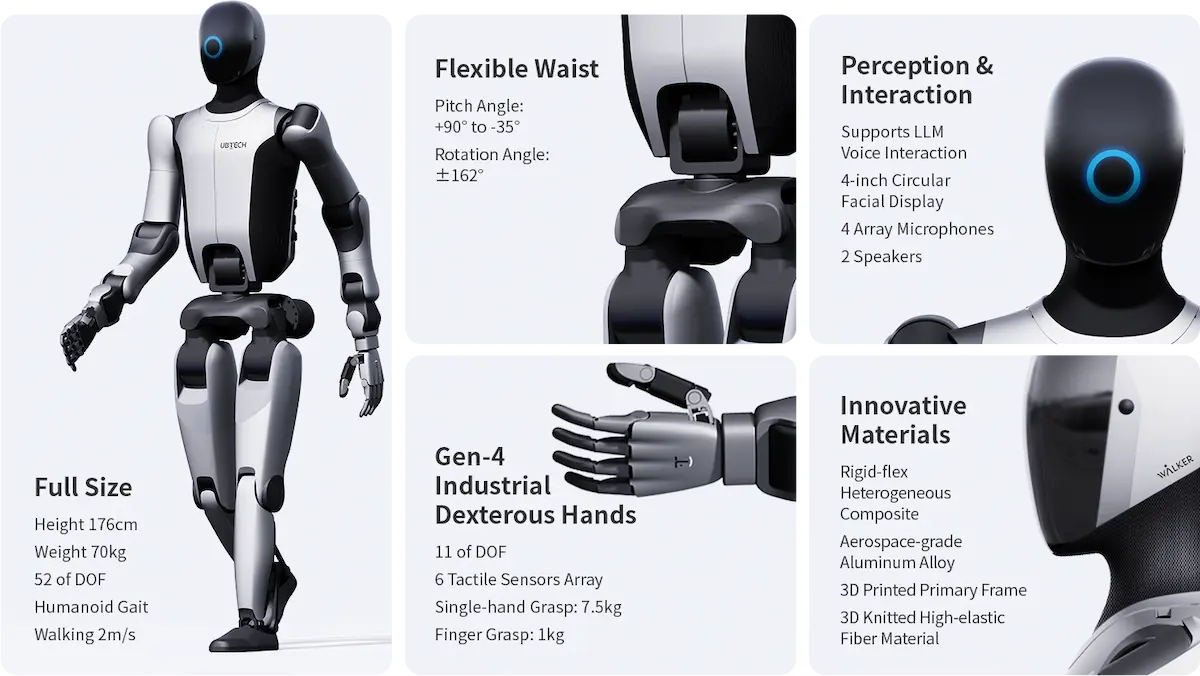
Thay đổi đáng giá nhất về mặt năng suất không nằm ở tay hay chân, mà nằm ở hệ thống xoay eo. Với khả năng xoay ±162°, “ứng viên” này có thể lấy linh kiện từ khay bên trái và lắp ráp sang khung xe bên phải mà không cần phải bước chân quay người. Điều này cắt giảm đáng kể mức tiêu hao động năng và tối ưu hóa thời gian chu kỳ (Cycle Time).
Trái tim của hệ thống truyền động là cụm mô-đun tích hợp: Động cơ mô-men xoắn không khung (Frameless torque motors) kết hợp cùng hộp số giảm tốc sóng hài (Harmonic reduction gears). Khối động cơ to bằng quả bưởi này có thể tạo ra lực xoắn cực đại lên tới 450 Nm, tương đương sức kéo của một chiếc xe bán tải cỡ trung.
2. Thẩm định Tay gắp: Rào cản linh hoạt
Để thao tác với các chi tiết mềm như gioăng cao su hoặc dây cáp, tay kẹp cơ khí hai chấu truyền thống là vô dụng. Walker S2 được trang bị hệ thống tay gắp (EOAT – End-of-Arm Tooling) thế hệ thứ 4, sở hữu 11 DoF cho mỗi bàn tay (7 khớp chủ động và 4 khớp thụ động).
Sức mạnh thực sự nằm ở thuật toán Điều khiển lai lực-vị trí (Force-position hybrid control). Thay vì chỉ ra lệnh “di chuyển ngón tay đến tọa độ X”, não bộ sẽ chỉ đạo “di chuyển ngón tay cho đến khi lực cản đạt Y Newton”. Kết hợp cùng lớp da bọc polyurethane chứa cụm cảm biến xúc giác đa mảng, robot có thể kẹp một cuộn dây đai an toàn với lực tải động 1.0 kg/ngón mà không làm đứt sợi vải.

3. Sự thật kỹ thuật về Độ lệch nhiệt
Phía sau các đoạn video PR trơn tru là một thực tế vật lý nghiệt ngã: Quá nhiệt.
Khi Walker S vươn tay giữ một vật nặng 15 kg, nó không có bệ đỡ bê tông như các cánh tay robot công nghiệp. Các động cơ tại vai, hông và đầu gối phải liên tục bơm dòng điện khổng lồ để tạo ra mô-men xoắn tĩnh nhằm giữ thăng bằng. Dòng điện này chạy qua các cuộn dây đồng, tạo ra nhiệt lượng cực lớn (Joule heating). Oái oăm thay, lớp vỏ bảo vệ bằng nhựa ABS+PC của cỗ máy lại hoạt động như một lớp cách nhiệt hoàn hảo, giam giữ toàn bộ luồng khí nóng bên trong.
Hệ quả là hiện tượng Độ lệch nhiệt (Thermal Drift). Nhiệt độ tăng làm tăng điện trở của dây đồng và làm suy giảm từ thông của nam châm vĩnh cửu. Động cơ yếu đi, hệ thống buộc phải bơm thêm điện để bù đắp, tạo ra một vòng lặp tử thần. Ở các bài test chịu tải 15 kg liên tục không có tản nhiệt chủ động, các chốt an toàn nhiệt sẽ kích hoạt và buộc robot phải tắt máy “nghỉ ngơi” chỉ sau khoảng 7 phút.
Để giải quyết điểm mù này trên S2, UBTECH đã phải vay mượn chuỗi cung ứng linh kiện xe điện (từ nhà cung cấp Sanhua) để tích hợp hệ thống làm mát chất lỏng vi mô (Micro-fluidic cooling loops) thẳng vào khung hợp kim nhôm, bơm nhiệt lượng khỏi các khớp trọng yếu.
4. Bài toán Hao hụt kWh và Trạm thay pin nóng
Nếu đưa “ứng viên” này vào ca làm việc 8 tiếng với tác vụ bốc vác cường độ cao, mức tiêu thụ điện trung bình của nó (duy trì thăng bằng, xử lý hình ảnh, vận hành tản nhiệt) lên tới 1.5 kW/giờ. Tính ra, một ca làm việc tiêu chuẩn đòi hỏi khoảng 12 kWh năng lượng.
Thế nhưng, theo hồ sơ thông số phần cứng, Walker S2 chỉ mang trên lưng cụm pin LFP (Lithium Iron Phosphate) kép 48V-7Ah, tức tổng dung lượng vỏn vẹn 0.672 kWh. Một phép chia đơn giản cho thấy: Dưới tải trọng công nghiệp nặng, cỗ máy này sẽ cạn sạch pin chỉ trong khoảng 26.8 phút.
Tăng kích thước pin không phải là giải pháp, vì pin nặng hơn sẽ đòi hỏi động cơ lớn hơn, từ đó sinh ra nhiều nhiệt hơn. Lối thoát duy nhất là cấu trúc Thay pin nóng (Hot-swappable).
Khi pin chính chạm ngưỡng cạn kiệt, hệ thống sẽ tự động dùng pin dự phòng phụ để duy trì luồng điều khiển, cho phép robot tự xoay eo 162°, dùng tay rút viên pin cạn sau lưng cắm vào trạm sạc và lấy viên pin đầy nhét lại vào người. Toàn bộ quy trình này diễn ra trong chưa tới 3 phút. Tuy nhiên, điều này đồng nghĩa với việc các nhà quản lý (Manager) phải đối mặt với một khoản chi phí đầu tư (CAPEX) không nhỏ để thiết lập hệ thống trạm sạc và thay pin tự động ngay trên sàn nhà máy.
/ Chuỗi bài viết robot Walker S
- Bài 1: Đánh giá Robot Hình người: Hiệu năng UBTECH Walker S tại nhà máy xe điện
- Đang đọc bài 2: Cấu trúc Phần cứng UBTECH Walker S: Đánh giá Động cơ và Cảm biến
- Bài 3: Giải phẫu Trí tuệ và Khả năng Điều hướng: Phân tích Năng lực Lõi AI và Tích hợp UBTECH Walker S
- Bài 4: Kiểm thử hiệu năng UBTECH Walker S: Đo lường tải trọng và thời gian chu kỳ
- Bài 5: Bài toán tài chính UBTECH Walker S: Phân tích chi phí đầu tư và vận hành

{kind=link}