
Trong các dây chuyền sản xuất vi điện tử hay tự động hóa phòng thí nghiệm, việc sử dụng một tay máy 6 bậc tự do đôi khi tạo ra sự dư thừa công năng và lãng phí diện tích. Đứng dưới lăng kính của một Đại lý Nhân sự Robot (Robot HR Agency), cỗ máy robot Festo EXCM không phải là một “nhân sự” vạn năng có thể đáp ứng mọi nhu cầu. Ngược lại, ứng viên này sở hữu một Bản mô tả công việc (JD) được tinh chỉnh chuyên biệt: Tập trung tối đa vào các tác vụ gắp thả tốc độ cao trong không gian hẹp.
Dưới đây là biên bản thẩm định năng lực và sự thật kỹ thuật về cấu trúc cơ khí của robot Festo EXCM, giúp doanh nghiệp “dùng đúng người, giao đúng việc” để tối ưu hóa bài toán hoàn vốn.
1. Cấu trúc Động lực học: Tối ưu Khối lượng di chuyển robot Festo EXCM
Khác với các hệ thống phân tầng truyền thống, Festo EXCM vận hành dựa trên nguyên lý động học song song dạng chữ H (H-gantry parallel kinematics).
Sự sắc sảo của thiết kế này nằm ở việc hãng đã gỡ bỏ động cơ khỏi các trục di chuyển, cố định chúng tại khung cơ sở (Base plate). Lựa chọn kỹ thuật này giúp giảm thiểu triệt để khối lượng di chuyển (Moving mass). Khi không phải “cõng” thêm phần cứng trên lưng, quán tính sinh ra trong các pha tăng tốc hoặc hãm phanh được triệt tiêu đáng kể. Đây là nền tảng cốt lõi giúp hệ thống duy trì độ ổn định khi định vị ở tốc độ cao.
Tuy nhiên, bài toán đánh đổi (Trade-off) ở đây là việc quy hoạch không gian. Dù Footprint (Diện tích chiếm chỗ) được thiết kế tối ưu cho các ứng dụng để bàn, kỹ sư tích hợp cần tính toán chính xác hành trình biên để tránh rủi ro kẹt hệ thống ròng rọc cơ khí khi vận hành trong các tủ an toàn sinh học hẹp.
2. Lăng kính Định lượng: Giới hạn Tải trọng và Độ chính xác
Một người Giám đốc công nghệ (CTO) thực dụng sẽ thiết lập các ranh giới an toàn dựa trên dữ liệu định lượng thay vì thông số quảng cáo. Sức vác của Festo EXCM là một biến số phụ thuộc chặt chẽ vào phương án gá lắp và vector trọng lực.
- EXCM-30: Khi lắp đặt theo phương ngang chuẩn, Payload (Tải trọng) tối đa đạt mức 3 kg. Tuy nhiên, nếu doanh nghiệp gá lắp hệ thống theo phương thẳng đứng dọc tường, sức vác này sẽ giới hạn lại ở mức 2 kg do sức cản của trọng lực tác động lên dầm ngang.
- EXCM-40: Ở biến thể có dải hành trình mở rộng lên tới 2 mét, thiết bị có khả năng gánh tải trọng lên đến 4 kg (ở phương ngang).
Về khả năng định vị, hệ thống duy trì độ chính xác lặp lại (Repetition accuracy) ở mức ± 0.05 mm. Mức dung sai vi mô này được kiểm soát thông qua cấu trúc vòng lặp kín (Closed-loop). Bộ mã hóa quang học (Optical encoder) tích hợp bên trong sẽ liên tục gửi xung phản hồi về bộ điều khiển trung tâm, đảm bảo động cơ bước luôn bám sát tọa độ mục tiêu.
3. Đo lường Chu kỳ Thời gian (Cycle Time) Thực chiến
Năng lực cốt lõi của Festo EXCM được phát huy tối đa khi hệ thống phải xử lý những tác vụ yêu cầu thông lượng lớn, lặp đi lặp lại không ngừng nghỉ.
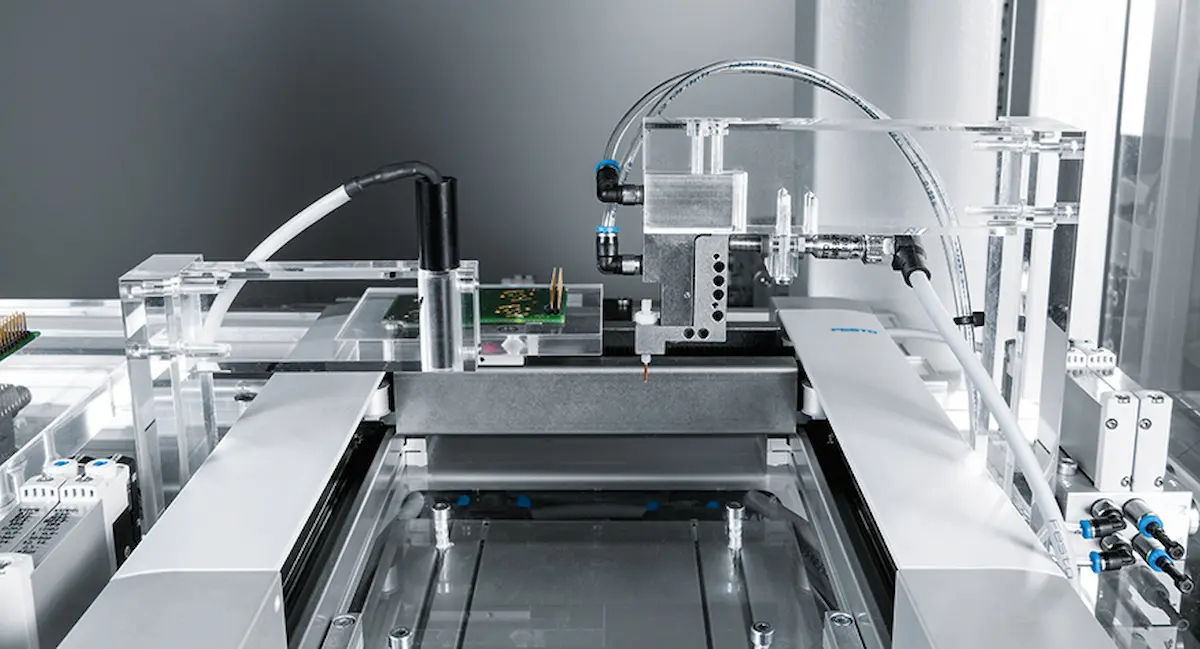
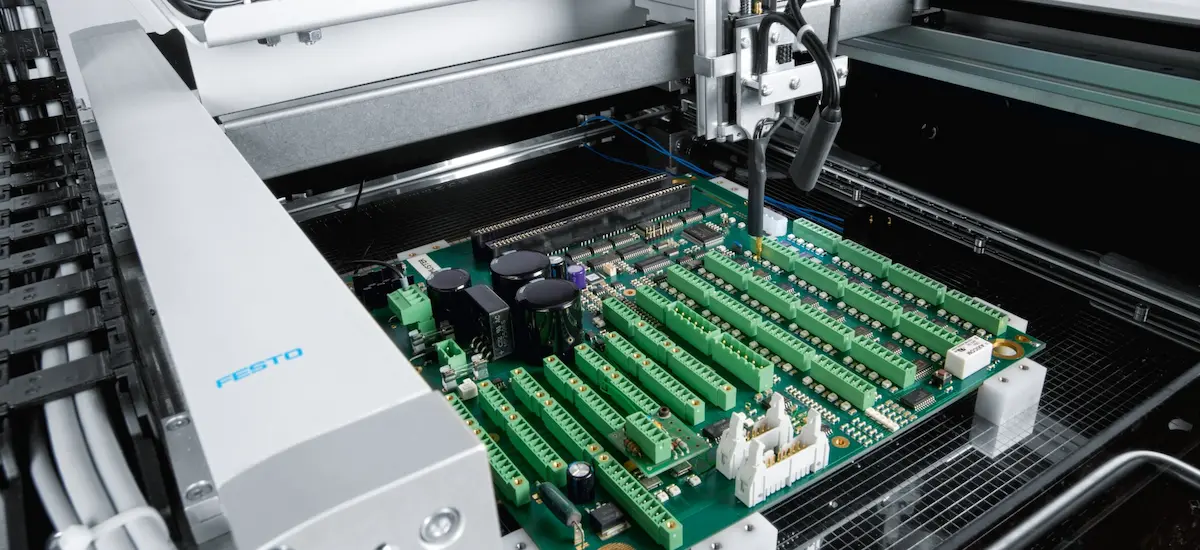
Trong dây chuyền lắp ráp vi điện tử: Dữ liệu từ nền tảng thử nghiệm thiết bị di động Chameleon (PKC Electronics) cho thấy, khi thực hiện chu trình phức hợp (gắp bo mạch, định tâm, hàn chọn lọc và thả khay), hệ thống đạt Cycle Time (Thời gian chu kỳ) dưới 3 giây/sản phẩm. Để đạt được thông số này, hệ thống sử dụng kỹ thuật “Kích hoạt đang bay” (Trigger on the fly). Bộ điều khiển sẽ gửi xung I/O kích hoạt van khí nén ngay trong lúc cụm trượt đang di chuyển, giúp triệt tiêu hoàn toàn độ trễ xử lý (Processing latency) tại các điểm tham chiếu.
Trong Tự động hóa phòng thí nghiệm (Medical Lab Automation): Tại hệ thống máy xét nghiệm chẩn đoán phân tử Fast MDx, “ứng viên” này thực hiện nhiệm vụ hút xả dung dịch (Pipetting) với độ phân giải thể tích vi lượng 10 µl. Năng suất đo lường thực tế đạt 125 mẫu bệnh phẩm/giờ, tương đương 28.8 giây/chu trình liên hoàn (đâm xuyên nắp, hút hóa chất, nhả vào đĩa vi giếng và vứt bỏ đầu pipet).
Tạm kết từ ROWOR
Festo EXCM là một “nhân sự tự động” mang lại giá trị thực tiễn cao nếu được đặt đúng vào các bài toán yêu cầu gia tốc nhanh, tải trọng nhẹ và hoạt động trên mặt phẳng. Khả năng tích hợp trơn tru giúp doanh nghiệp dễ dàng kiểm soát CAPEX, OPEX và thúc đẩy chỉ số ROI trong thời gian ngắn.
Tuy nhiên, mọi cỗ máy đều có giới hạn cơ khí riêng. Việc vận hành dựa trên hệ thống truyền động đai (Belt-driven) sẽ đối mặt với các rủi ro hao mòn vật lý nào khi chạy liên tục ở cường độ cao? Chúng ta sẽ tiếp tục rã máy để bóc tách những điểm mù cơ khí này trong kỳ tiếp theo.
/ Chuỗi bài robot Festo EXCM
- Đang đọc bài 1: Đánh giá Robot Tọa độ Festo EXCM: Năng lực Lắp ráp Vi mô và Gắp thả
- Bài 2: Rã máy Robot Tọa độ Festo EXCM: Rào cản Cơ khí và Phân tích Hệ thống Truyền động
- Bài 3: Phân tích chi phí đầu tư Festo EXCM: Đo lường rủi ro và Bài toán hoàn vốn

{kind=link}