
Trên các bảng thông số kỹ thuật (Datasheet), cấu trúc robot tọa độ của Festo EXCM thường ghi nhận mức gia tốc hệ cơ học đạt ngưỡng 50 m/s². Tuy nhiên, đứng dưới góc độ của một Đại lý Nhân sự Robot (Robot HR Agency), nhiệm vụ của chúng ta là rã máy Festo EXCM (Hardware Teardown) để đo lường năng lực thực chiến khi “ứng viên” này phải vận hành liên tục trong môi trường 3 ca.
Việc thiết kế một hệ thống tối ưu không gian luôn đi kèm với những rào cản vật lý nhất định. Dưới đây là biên bản phân tích cấu trúc cơ khí, buộc kỹ sư tích hợp hệ thống phải đối diện với “Bài toán đánh đổi” (Trade-off) trước khi cấp ngân sách.
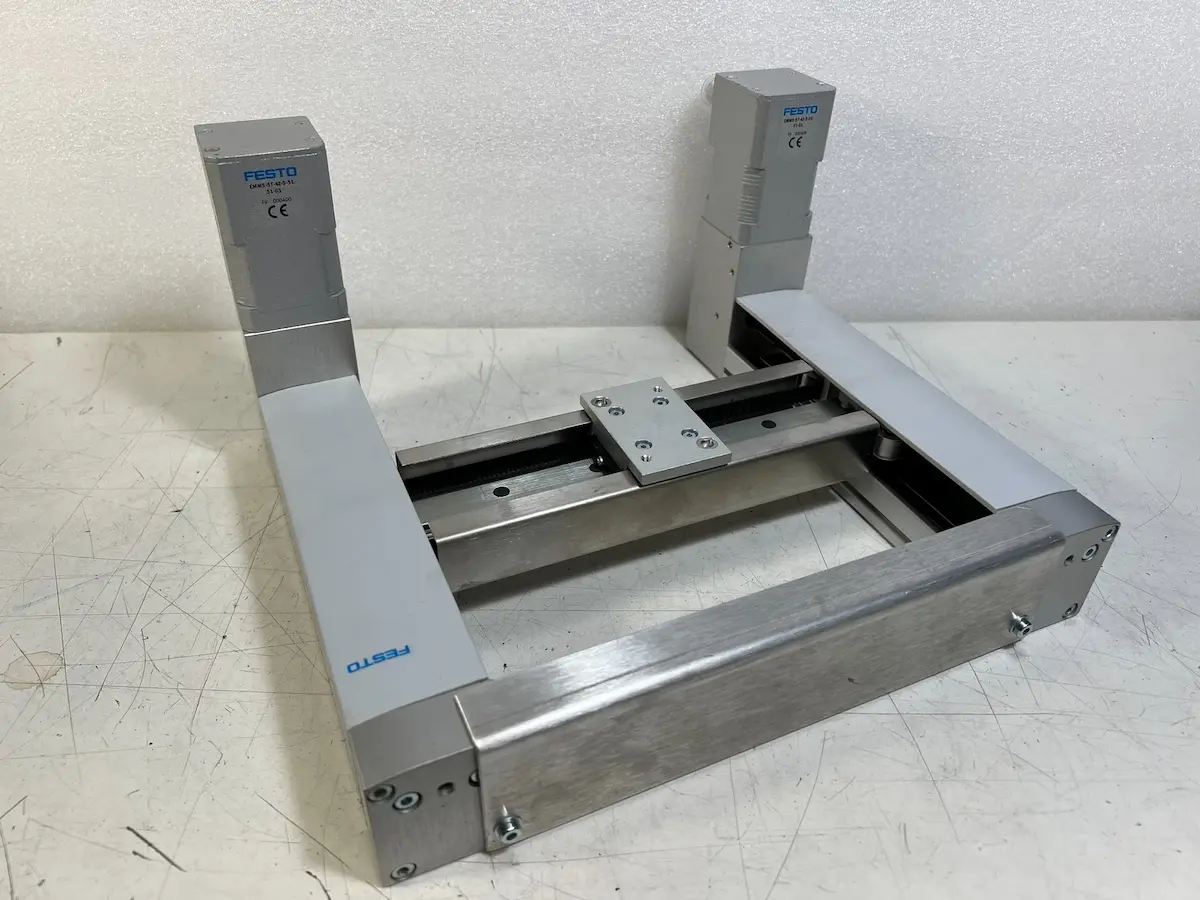
1. Động học chữ H (H-Gantry) và Giới hạn Động cơ bước
Sự đột phá về tốc độ của Festo EXCM đến từ việc loại bỏ cấu trúc phân tầng truyền thống, chuyển sang sử dụng nguyên lý H-Gantry (Cổng trục chữ H). Hai động cơ bước (Stepper motor) được gỡ khỏi các trục chuyển động và neo cố định xuống bệ máy. Chúng dùng chung một sợi dây đai tuần hoàn để nội suy tọa độ X-Y.
- Lợi thế gia tốc: Khối lượng di chuyển (Moving mass) giảm xuống cực thấp, giúp hệ thống lướt đi với quán tính không đáng kể.
- Điểm mù phân bổ tải trọng: Khi cỗ máy thực hiện quỹ đạo chạy chéo góc 45 độ, cơ cấu H-Gantry ép buộc một động cơ phải quay hết tốc lực để thu đai, trong khi động cơ còn lại phải phanh giữ vị trí. Lúc này, toàn bộ khối lượng tĩnh và động dồn lên một trục duy nhất.
- Độ trễ xử lý từ Stepper Motor: Ở dải vận tốc cao, đặc tính tự cảm (Inductance) của cuộn dây bên trong động cơ bước làm suy giảm mô-men xoắn. Nếu kỹ sư cố tình thiết lập mức Payload (Tải trọng) sát trần 4kg, động cơ sẽ rơi vào trạng thái quá tải, dẫn đến hiện tượng trượt bước (Step loss) và làm lệch toàn bộ ma trận tọa độ.
2. Rã máy Festo EXCM tìm lỗ hổng truyền động đai và độ rơ cơ khí
Hệ thống dẫn động cốt lõi của EXCM phụ thuộc vào một sợi đai làm từ cao su Polychloroprene kết hợp lõi chịu lực sợi thủy tinh (Glass cord). Lời cam kết về độ lặp lại ± 0.05 mm sẽ suy giảm phi tuyến tính sau mốc vòng đời cơ học 3.500 km.
- Độ dãn dư vĩnh viễn (Creep elongation): Khi bị kéo căng bởi gia tốc định mức liên tục, vật liệu cao su sẽ giãn ra và mất đi khả năng đàn hồi ban đầu.
- Sinh ra Độ rơ cơ khí (Backlash): Sự mài mòn sau hàng triệu chu kỳ uốn cong qua các cụm puly nhôm tạo ra khe hở giữa răng đai và rãnh puly. Trên cấu trúc H-Gantry, một milimet độ rơ sẽ làm sai lệch quỹ đạo nội suy (ví dụ: đường bôi keo hình tròn sẽ bị méo thành hình bầu dục).
- Rào cản bảo trì (OPEX): Tài liệu kỹ thuật chỉ định rõ không được vặn ốc để siết lại đai đã dãn. Việc căng đai quá mức (Over-tensioning) sẽ tạo ra mô-men uốn làm hỏng trục động cơ và gây áp lực lên thanh dẫn hướng. Giải pháp duy nhất là trích lập OPEX để thay đai định kỳ.

3. Hiện tượng Xoắn khung và Tải trọng Đặt trước
Cấu trúc dùng chung một sợi đai vòng kín luôn tạo ra sự bất đối xứng: nhánh đang kéo rất căng (Tight side) và nhánh thu hồi bị chùng (Slack side). Sự chênh lệch này sinh ra một ngẫu lực bẻ vặn, khiến thanh trục ngang (Y-traverse) có xu hướng bị lệch góc, hay còn gọi là hiện tượng xoắn khung (Racking).
Để vô hiệu hóa lực vặn này, Festo sử dụng hệ thống thanh trượt bi tuần hoàn (Recirculating ball bearing) và nén các viên bi thép bằng Tải trọng đặt trước (Preload).
- Bài toán đánh đổi: Preload tạo ra độ cứng vững tuyệt vời nhưng lại gia tăng ma sát nội tại. Khi hệ thống chạy ép xung, nhiệt lượng từ ma sát sẽ làm hao hụt màng mỡ bôi trơn. Nếu không được bảo trì đúng hạn, hiện tượng ma sát khô (Metal-to-metal contact) sẽ làm xước rãnh bi, khiến thanh dẫn hướng mất đi khả năng kháng lực xoắn.
4. Biến số Trôi nhiệt (Thermal Drift)
Nhiệt độ môi trường và nhiệt lượng tỏa ra từ động cơ là một biến số vật lý có khả năng làm sai lệch hệ thống định vị thông qua hiện tượng Trôi nhiệt (Thermal drift).
Vấn đề cốt lõi nằm ở sự chênh lệch Hệ số giãn nở nhiệt (CTE): Khung nhôm của máy giãn nở nhanh khi nhiệt độ tăng, trong khi lõi sợi thủy tinh của dây đai thì gần như trơ lỳ. Hệ quả là khi khung nhôm vươn dài ra thêm hàng chục micromet, nó kéo khoảng cách giữa các puly ra xa trong khi dây đai kiên quyết không giãn thêm.
Lực căng (Tension force) bị ép tăng vọt, đẩy một tải trọng hướng kính (Radial load) cực lớn lên các vòng bi và trục động cơ. Do không được trang bị thước quang học (Linear scales), bộ điều khiển sẽ không thể tự động nội suy bù trừ cho sự sai lệch vật lý này.
5. Ranh giới Tích hợp: EXCM so chiếu với SCARA
Khi đặt Festo EXCM lên bàn cân cùng robot SCARA, chúng ta nhận diện rõ hai giới hạn cơ học định hình Bản mô tả công việc (JD) của thiết bị này:
- Độ cứng vững trục dọc (Z-axis Stiffness): SCARA có cấu trúc trụ cứng vững, sinh ra để thực hiện các thao tác chèn ép (Vertical insertion). Ngược lại, cụm trục Z của EXCM có thiết kế treo hẫng (Cantilever). Bất kỳ lực nén mạnh nào theo phương thẳng đứng cũng sẽ tạo ra đòn bẩy bẻ cong thanh dẫn bi.
- Thời gian dập tắt rung (Settling Time): Khi mũi công cụ EXCM phanh gấp từ vận tốc cao, tính đàn hồi của dây đai cao su sẽ tạo ra hiện tượng rung lắc nhẹ (Ringing). Hệ thống bắt buộc phải tiêu tốn một phần nhỏ thời gian chu kỳ để đợi dao động này tắt hẳn trước khi nhả vật thể, khiến thông lượng của nó khó chạm đến ngưỡng chớp nhoáng của hệ thống truyền động bánh răng cứng trên SCARA.
Nhìn chung, nếu Bản mô tả công việc của doanh nghiệp yêu cầu lực nhấn mạnh dọc trục hoặc một chu kỳ gắp thả siêu tốc độ không độ trễ, Festo EXCM sẽ gặp những rào cản vật lý khó vượt qua. Nhưng để biết chính xác liệu những rào cản này có cản bước cỗ máy trở thành một khoản đầu tư sinh lời hay không, chúng ta phải chuyển sang phân tích các chỉ số CAPEX và ROI trong phần cuối của chuỗi bài.
/ Chuỗi bài robot Festo EXCM
- Bài 1: Đánh giá Robot Tọa độ Festo EXCM: Năng lực Lắp ráp Vi mô và Gắp thả
- Đang đọc bài 2: Rã máy Robot Tọa độ Festo EXCM: Rào cản Cơ khí và Phân tích Hệ thống Truyền động
- Bài 3: Phân tích chi phí đầu tư Festo EXCM: Đo lường rủi ro và Bài toán hoàn vốn

{kind=link}