
“Lưu ý: RobotWorks.vn phân tích thiết bị này dưới lăng kính kỹ thuật cơ khí, quản trị năng suất và bài toán hoàn vốn (ROI). Bài viết hoàn toàn không mang tính chất đánh giá lâm sàng và không phải là nội dung tư vấn y khoa.”
Trong hệ sinh thái tự động hóa phòng mổ, phần lớn các cỗ máy đều đi theo tư duy thiết kế nguyên khối khổng lồ. Tuy nhiên, “ứng viên” robot Hugo RAS từ Medtronic lại chọn cách phá vỡ cấu trúc này bằng một hệ thống phân tán. Đặt mẫu robot này lên bàn phỏng vấn kỹ thuật, chúng ta sẽ rã máy để xem xét bản mô tả công việc (JD) thực tế, từ biên độ khớp nối, độ trễ tín hiệu cho đến tuổi thọ của từng tay gắp.
1. Cấu trúc cơ khí rời rạc: Chia nhỏ để trị
Thay vì tích hợp tất cả cánh tay vào một khung sườn duy nhất, Hugo RAS sử dụng cấu trúc thiết kế dạng mô-đun (Modular Design). Hệ thống này tách biệt hoàn toàn thành 4 xe đẩy cánh tay (Arm Carts) hoạt động độc lập, kết nối với nhau và với trạm điều khiển thông qua một hệ thống tháp trung tâm (System Tower).
Về mặt kỹ thuật, mỗi xe đẩy là một cỗ máy cơ điện tự chủ với trọng tâm thấp để chống lật khi chịu mô-men xoắn cao (Peak joint torque ở mức 8.0 Nm). Nền tảng vật lý này được dẫn động bởi hệ thống motor sử dụng nguồn 24VDC, cho công suất đầu ra tối đa 120W trên mỗi trục. Việc chia nhỏ cấu trúc cho phép “nhân sự” này len lỏi vào các vị trí hẹp, tuy nhiên, nó đòi hỏi sự tính toán không gian gắt gao hơn từ đội ngũ y tế để tránh va chạm vật lý giữa 4 đế xe rời rạc này.
2. Giới hạn chuyển động và Cổ tay vi phẫu robot Hugo RAS
Năng suất của một robot phẫu thuật nằm ở khả năng thao tác trong không gian chật hẹp. Hugo RAS sở hữu cánh tay cơ khí 6 khớp bản lề. Khi lắp đặt thiết bị thao tác cuối (End-effector – Tay gắp/Kéo cắt), tổng bậc tự do (Degrees of Freedom – DoF) của toàn hệ thống đạt mức 7 đến 8 bậc, mô phỏng chính xác cấu trúc giải phẫu cổ tay người.
Thông số ấn tượng nhất của ứng viên này nằm ở giới hạn cơ khí của khớp cổ tay:
- Biên độ xoay liên tục: Lên tới 520 độ, vượt xa mức 360 độ của các dụng cụ nội soi truyền thống. Điều này cho phép máy thực hiện các vòng xoay khâu liên tục mà không cần phải nhả ngàm và kẹp lại.
- Độ chính xác khớp nối: Biên độ sai số chỉ ở mức 0.152 độ.
- Tần số phản hồi xúc giác (Haptic Feedback Rate): Hệ thống cập nhật lực cản từ mô mềm truyền về tay người điều khiển với tốc độ 1.000 Hz, đảm bảo bác sĩ cảm nhận được độ căng vật lý gần như theo thời gian thực.

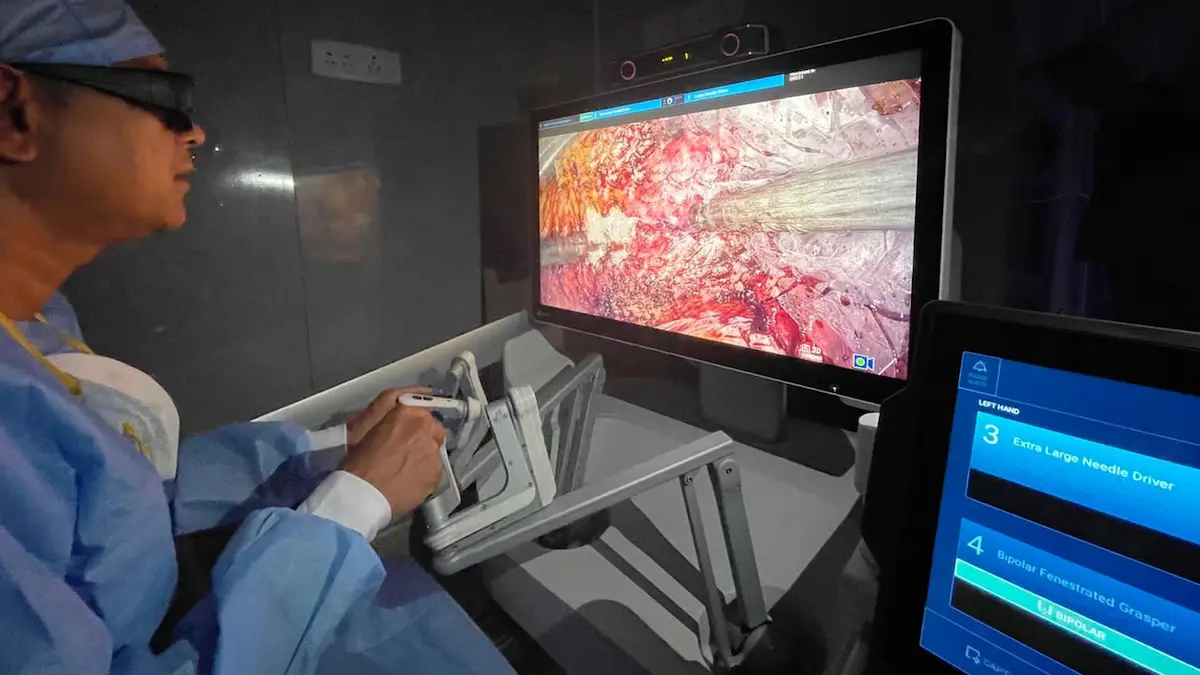
3. Trạm điều khiển mở và Rào cản độ trễ tín hiệu
Trạm điều khiển của Hugo RAS từ chối thiết kế “buồng tối” đóng kín thường thấy. Nó sử dụng một trạm điều khiển mở (Open Console) với màn hình hiển thị 3D thụ động (Passive 3D Monitor), yêu cầu người vận hành đeo kính phân cực để cảm nhận chiều sâu không gian. Ở các phiên bản mới nhất, tấm nền hiển thị đã đạt độ phân giải 5K, sử dụng công nghệ mini-LED với tần số quét 25 – 50 Hz.
Điểm đáng chú ý trong bản JD này là cơ chế an toàn liên động (Safety Interlocks):
- Cảm biến theo dõi hướng nhìn (Head-tracking): Một camera hồng ngoại liên tục đo lường vector từ mắt người điều khiển tới tâm màn hình. Nếu bác sĩ quay mặt đi chỗ khác để giao tiếp với ê-kíp, hệ thống lập tức ngắt lệnh điều khiển tay robot để tránh thao tác “mù”.
- Độ trễ vận hành (Latency): Tổng thời gian từ lúc bác sĩ nhích tay trên bàn điều khiển cho đến khi động cơ stepper trên xe đẩy thực thi lệnh rơi vào khoảng 25 ms đến 50 ms. Đây là ngưỡng độ trễ tiêu chuẩn, đảm bảo tính đồng bộ giữa thị giác và hành động cơ khí.
4. Vòng đời linh kiện và Giao thức lắp đặt
Một trong những bài toán hao mòn vật tư lớn nhất của robot y tế là tuổi thọ của thiết bị thao tác cuối. Hệ thống robot Hugo RAS sử dụng chuẩn kích thước ống luồn nội soi (Trocars) đường kính 11mm cho camera và 8mm cho các tay gắp cơ khí.
Về mặt vòng đời, mỗi tay gắp của Hugo được gắn một chip nhớ (RFID/EEPROM) để theo dõi số lần cắm/rút. Tuổi thọ giới hạn của linh kiện này được ấn định ở mức 20 lần sử dụng (20 uses) trước khi hệ thống khóa vĩnh viễn và yêu cầu thay mới. So với mức 10-15 lần của một số nền tảng đối thủ, đây là một điểm cộng về mặt thông số khi xét đến bài toán vật tư tiêu hao.
Nhận định của ROWOR: Nhìn vào bản mô tả phần cứng, Medtronic Hugo RAS là một ứng viên cơ khí sắc sảo với biên độ xoay ấn tượng và cơ chế an toàn ngặt nghèo. Tuy nhiên, việc tách rời 4 cánh tay độc lập mang lại sự linh hoạt hay sẽ tạo ra “Điểm mù không gian” và rào cản tích hợp trong phòng mổ? Bài toán đánh đổi này sẽ được mổ xẻ chi tiết trong bài viết tiếp theo.
Tuyên bố Miễn trừ Trách nhiệm (Disclaimer): Nội dung phân tích thiết bị trên RobotWorks.vn được thực hiện dưới lăng kính kỹ thuật, quản trị năng suất và bài toán tài chính. Chúng tôi đánh giá hệ thống máy móc như một “nhân sự tự động” dựa trên các thông số cơ khí, kiến trúc phần cứng và rào cản tích hợp. Bài viết hoàn toàn không mang tính chất đánh giá lâm sàng, không cấu thành lời khuyên y khoa và không thay thế phác đồ điều trị của đội ngũ chuyên môn. Mọi quyết định đầu tư và ứng dụng thiết bị cần được đối chiếu chặt chẽ với các tiêu chuẩn y tế hiện hành (FDA/ISO).
/ Chuỗi bài robot Hugo RAS
- Đang đọc bài 1: Đánh giá Phần cứng Robot Y tế Hugo RAS: Bản mô tả công việc cho Nhân sự Phòng mổ
- Bài 2: Bài toán Đánh đổi của Robot Hugo RAS: Rào cản Tích hợp và Hao hụt Vận hành
- Bài 3: Bóc tách Tài chính Robot Hugo RAS: Giải bài toán CAPEX, OPEX & Tỷ suất Hoàn vốn (ROI)

{kind=link}