
“Lưu ý: RobotWorks.vn phân tích thiết bị này dưới lăng kính kỹ thuật cơ khí, quản trị năng suất và bài toán hoàn vốn (ROI). Bài viết hoàn toàn không mang tính chất đánh giá lâm sàng và không phải là nội dung tư vấn y khoa.”
Trong bản đánh giá trước, chúng ta đã thấy cấu trúc mô-đun phân tán mang lại sự linh hoạt đáng nể cho thiết kế cơ khí của Hugo RAS. Tuy nhiên, mọi sự linh hoạt đều đi kèm một bài toán đánh đổi. Khi đưa “nhân sự” này vào không gian phòng mổ tiêu chuẩn, đội ngũ y tế buộc phải đối mặt với những rào cản ban đầu về thời gian thiết lập và quy hoạch không gian vận hành Hugo RAS. Đã đến lúc rã xới các thông số vận hành thực chiến để xem sau khi vượt qua đường cong học tập, cỗ máy này bộc lộ những điểm mù và lợi thế nào.
1. Bài toán Không gian: Thách thức chiếm dụng và Lợi thế tùy biến vận hành Hugo RAS
Khác với thiết kế cánh tay gắn chung trên một trục cần cẩu (boom-mounted) của da Vinci Xi, với diện tích chiếm dụng trung tâm khoảng 1.46 m² khi triển khai đầy đủ, Hugo RAS sử dụng 4 xe đẩy cánh tay hoàn toàn độc lập.
Về mặt thông số tĩnh, chiều dài mỗi cánh tay của Hugo lên tới 85 cm (so với khoảng 53 cm của da Vinci Xi). Điều này đòi hỏi hành lang di chuyển rộng hơn để các cánh tay hoạt động ở biên độ tối ưu (Range of Motion – ROM), từ đó tăng footprint tổng thể trong cấu hình full 4 arms, đặc biệt ở các phòng mổ nhỏ hẹp. Tuy nhiên, thiết kế modular cho phép di chuyển từng cart linh hoạt giữa các phòng mổ, rất phù hợp với bệnh viện có nhiều OR đa năng.
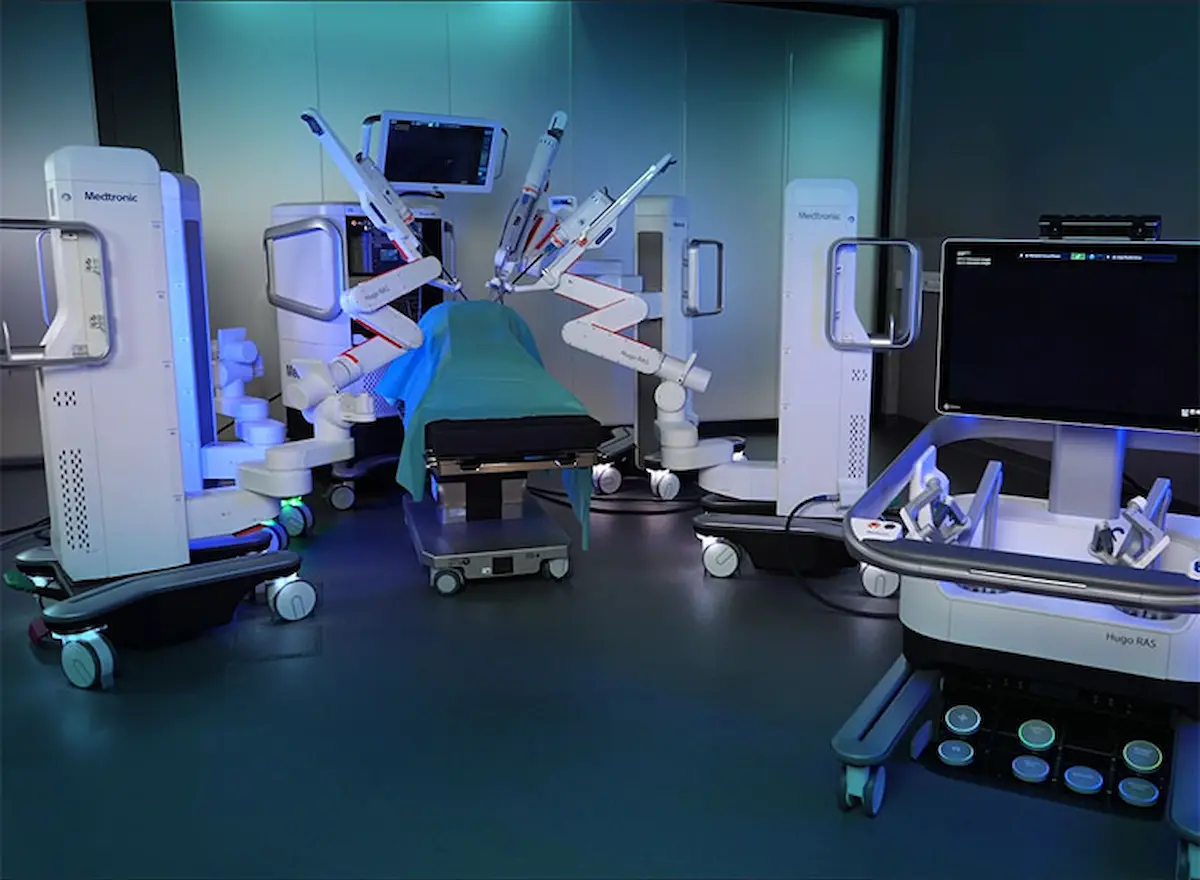
Bài toán đánh đổi ở đây lại mang lại lợi thế chiến lược rõ nét: Thiết kế phân tán cho phép bệnh viện tùy biến số lượng cánh tay theo từng ca cụ thể. Thay vì phải đưa toàn bộ hệ thống vào phòng mổ, ê-kíp có thể chỉ sử dụng 2 hoặc 3 cánh tay cho các ca tiểu phẫu hoặc ít phức tạp, giúp giải phóng không gian cục bộ và tiết kiệm đáng kể chi phí vật tư áo bọc vô khuẩn (Sterile drapes).
Hơn nữa, khớp nghiêng (Tilt joint) độc quyền cho phép các cánh tay tự điều chỉnh góc độ, tăng phạm vi chuyển động và giảm thiểu đáng kể rủi ro va chạm bên trong ổ bụng (Internal clash).
2. Sự thật về Thời gian Thiết lập (Setup Time) và Docking
Quá trình đưa thiết bị vào vị trí (Docking Process) của ứng viên này từng bị coi là điểm nghẽn lớn nhất. Các báo cáo ở giai đoạn đầu (Early adopter phase) ghi nhận tổng thời gian “chết” phi phẫu thuật (NonSPIT) có thể lên tới 94.3 phút, trong đó thời gian chuẩn bị hệ thống chiếm 45 – 48 phút.
Sự thật kỹ thuật là các con số này chỉ phản ánh Giai đoạn học việc (Novice phase). Khi ê-kíp phải tự điều chỉnh góc kết nối (Docking angle) cho từng xe đẩy, sự bỡ ngỡ là điều tất yếu. Tuy nhiên, báo cáo lâm sàng giai đoạn 2023-2025 cho thấy một bức tranh hoàn toàn khác sau khi đội ngũ điều phối vượt qua mốc 15 – 22 ca phẫu thuật:
- Thời gian Docking: Rút ngắn đột phá xuống chỉ còn trung bình 3 – 12 phút (nhiều trung tâm urology/gynecology ghi nhận mức 5 phút).
- Khoảng cách hiệu suất: Khi ê-kíp đã quen với quy trình, thời gian thiết lập tổng thể của Hugo RAS gần như tương đương, hoặc chỉ chênh lệch rất nhẹ so với các hệ thống nguyên khối truyền thống.
3. Rủi ro Va chạm Cơ khí (“Sword Fighting”) và Điểm mù Trợ lý
Trong phẫu thuật robot đa tay (Multi-arm robot), hiện tượng các cánh tay va chạm vật lý bên ngoài (External mechanical collisions – hay còn gọi là “Sword fighting”) là một rủi ro chung của ngành, không phải điểm yếu trong vận hành Hugo RAS.

Với Hugo, để triệt tiêu rủi ro này, cổng luồn nội soi (Trocars) buộc phải đặt cách nhau tối thiểu 8 cm. Trong những ca đầu tiên, phương thức di chuyển độc lập của 4 cánh tay vô tình tạo ra các điểm mù không gian (Spatial blind spots) đối với trợ lý đứng cạnh bàn mổ.
Tuy nhiên, khi đã làm chủ thiết bị, chính tính mô-đun lại trở thành giải pháp. Bác sĩ có thể định vị từng cánh tay ở các vị trí hoàn toàn độc lập, tạo ra các rãnh không gian an toàn mà các hệ thống nguyên khối (vị trí tay bị khóa cố định trên một trục) không thể làm được.
4. Tải trọng Nhận thức và Đường cong Học tập của Ê-kíp
Rào cản lớn nhất của Hugo RAS nằm ở sự chuyển dịch áp lực từ bác sĩ chính sang vai trò của y tá dụng cụ và kỹ thuật viên phụ mổ.
Dữ liệu đo lường tải trọng nhận thức (SURG-TLX) cho thấy mức độ căng thẳng của y tá vòng trong đạt tới 27 điểm trong các ca đầu tiên, do phải quản lý ma trận góc độ và hệ thống cáp nối rời rạc. Tuy nhiên, để giải quyết vấn đề này, Medtronic đã triển khai lộ trình đào tạo chuyên sâu (ASCEND pathway). Kết hợp với Trạm điều khiển mở (Open Console) giúp duy trì giao tiếp bằng mắt và giọng nói liền mạch, tải trọng nhận thức của toàn ê-kíp giảm nhanh chóng sau chu kỳ 15 ca phẫu thuật đầu tiên.
Nhận định của ROWOR: Dưới lăng kính tuyển dụng, Medtronic Hugo RAS là một “nhân sự” yêu cầu quá trình Onboarding (Hòa nhập) khá khắt khe. Trong 15-20 ca đầu tiên, nó đòi hỏi sự kiên nhẫn của toàn bộ ê-kíp phòng mổ để làm quen với cấu trúc phân tán. Nhưng một khi vượt qua đường cong học tập, bài toán đánh đổi này mang lại phần thưởng xứng đáng: một hệ thống cực kỳ linh hoạt, có thể tháo lắp tùy biến cho các diện tích phòng mổ đa dụng và tối ưu hóa tuyệt đối không gian can thiệp.
Tuyên bố Miễn trừ Trách nhiệm (Disclaimer): Nội dung phân tích thiết bị trên RobotWorks.vn được thực hiện dưới lăng kính kỹ thuật, quản trị năng suất và bài toán tài chính. Chúng tôi đánh giá hệ thống máy móc như một “nhân sự tự động” dựa trên các thông số cơ khí, kiến trúc phần cứng và rào cản tích hợp. Bài viết hoàn toàn không mang tính chất đánh giá lâm sàng, không cấu thành lời khuyên y khoa và không thay thế phác đồ điều trị của đội ngũ chuyên môn. Mọi quyết định đầu tư và ứng dụng thiết bị cần được đối chiếu chặt chẽ với các tiêu chuẩn y tế hiện hành (FDA/ISO).
/ Chuỗi bài robot Hugo RAS
- Bài 1: Đánh giá Phần cứng Robot Y tế Hugo RAS: Bản mô tả công việc cho Nhân sự Phòng mổ
- Đang đọc bài 2: Bài toán Đánh đổi của Robot Hugo RAS: Rào cản Tích hợp và Hao hụt Vận hành
- Bài 3: Bóc tách Tài chính Robot Hugo RAS: Giải bài toán CAPEX, OPEX & Tỷ suất Hoàn vốn (ROI)

{kind=link}